在这篇文章中,我将回顾一个经验法则,该法则可用于估算RMS周期间抖动,前提是你知道RMS周期抖动。我首先在实验室中观察了这个经验法则,并随后了解了更多。
该经验法则是什么?
该法则很简单。如果周期抖动分布是高斯或正态分布,则周期间抖动可以根据周期抖动估算如下:
Jcc (RMS)= sqrt(3) * Jper (RMS)
我首先在定时知识库文章中记录了这一点,该文章是EstimatingRMS Cycle to Cycle Jitter from RMS Period Jitter (https://www.silabs.com/community/timing/knowledge-base.entry.html/2011/0...)。我今天会花更多时间在这个想法上,并从几个不同的角度来解决这个问题。
问题是什么?
在我们的应用笔记“A Primer On Jitter, Jitter Measurement and Phase-Locked Loops” (https://www.silabs.com/documents/public/application-notes/AN687.pdf)中,下图显示了后处理相位噪声进入定时抖动指标的下列斜率。周期抖动和周期间抖动分别显示为20dBc / dec和40dB / dec斜率的高通滤波器。要记住这样一个有用的例子。
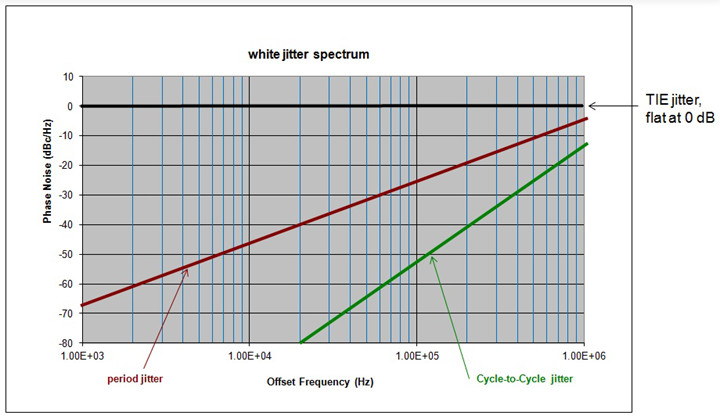
问题是,根据sqrt(3)规则,RMS周期间抖动如何大于RMS周期抖动,并且周期间抖动滤波器的斜率更陡?答案是,决定最终结果的不只是斜率。
重要术语
在继续之前,这里有几个来自AN279:Estimating Period Jitter from Phase Noise(https://www.silabs.com/documents/public/application-notes/AN279.pdf)的定义。
● 周期间抖动 - 相邻时钟周期之间的时钟周期中的短期变化。这种抖动测量(在此缩写为JCC)可以被特指为RMS或峰间量。
● 周期抖动 - 与平均时钟周期相比,所有测量时钟周期内时钟周期的短时变化。这种抖动测量(在此缩写为JPER)可以指定为RMS或峰间量。
实验室测量例子
首先,下面的示例实验测量直接来自知识库文章。为了方便起见,带注释的图像变得更加紧凑。
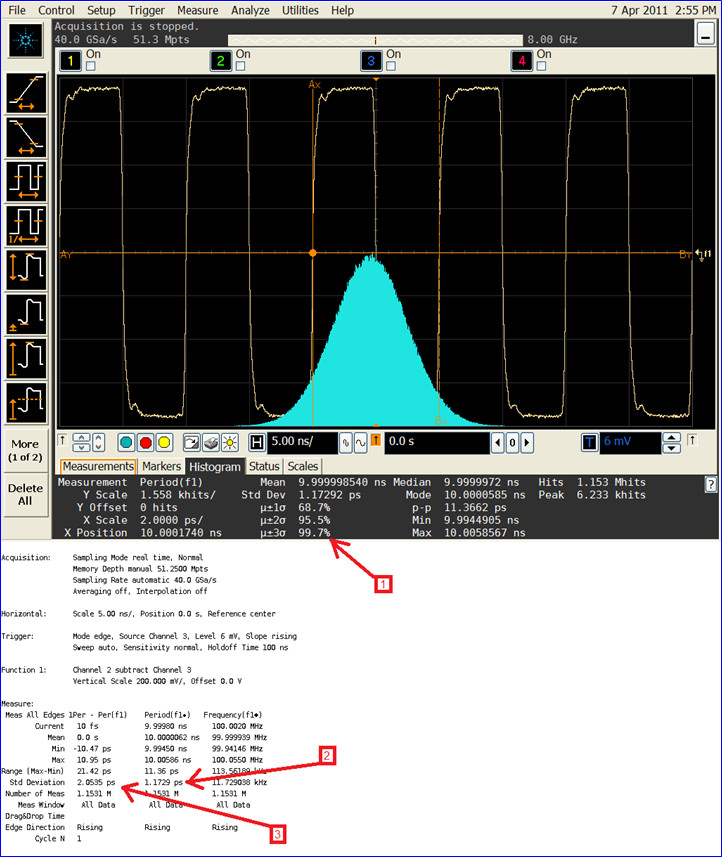
屏幕截图中有三个项目被调出。
1、在100万次循环后的周期分布呈现高斯分布,并且非常接近于分别符合±1,±2和±3标准差的68-95-99.7%规则。
2、测量的RMS周期抖动是周期抖动分布的标准偏差或约1.17 ps。因此,我们可以估算RMS周期以抖动为sqrt(3)* 1.17 ps或2.03 ps。
3、实际测量的周期到周期抖动为2.05 ps,这与估算值相当接近。
Excel演示示例
您也可以在Excel模拟中演示此规则。为了探索效果,我生成了一个电子表格,其中我选取了一个理想的时钟边缘,然后通过从高斯分布中采集随机样本来抖动边缘。然后,我进行了周期测量和周期间测量,每个周期测量30个边沿,每个边沿100个,时钟边沿表示100MHz时钟抖动。请注意,由于周期间抖动结果是带符号的,即正或负,所以我们应该预期这些量的标准偏差会更大,其他都相等。100个边缘试验通常比30个边缘试验更接近sqrt(3)规则,但即使在30个边缘上仍然可以看到总体效果。
经验法则的解释
那么这个经验法则是如何产生的呢?如前所述,我多年前在实验室首次观察到这一点。然而,我几乎没有看到这方面的文字。最终我找到了StatekTechnical Note 35,An overview of oscillator jitter(http://www.statek.com/products/pdf/TN-35%20Rev%20B.pdf)。下面的解释是这个推导的一个稍微简化和修改的版本,其中数量是“大”时间序列的期望值(回想我对100条边优于30条边收敛的规则)。
让下面的变量代表单个边缘的时间抖动的方差,即抖动边缘与理想边缘的时间差异。

每个测量周期是2个连续边缘值之间的差值,其中每个边缘抖动具有方差s2j。周期抖动有时被称为定时抖动的第一个差异。由于周期间抖动是相邻周期之间的差异,所以它可以被称为定时抖动的第二差异。
如果每个边缘的抖动是独立的,那么周期抖动的方差可以写为:

这正是我们所期望的每个“差异总和法”。你可以在这里看到一个例子,它指出了对于独立的(不相关的)变量:

然而,我们不能很容易地计算周期循环抖动,因为在每个周期到周期的测量中,我们使用两次“内部”时钟沿,因此我们必须考虑到这一点。相反,我们写道:

由于每个边缘的抖动被假定为独立的并且具有相同的统计特性,所以我们可以放弃互相关项并写出:

因此,差异的比例

这是一个有趣而意想不到的结果,至少对我来说:)
后处理阶段噪声
AN279:Estimating Period Jitter from Phase Noise(https://www.silabs.com/documents/public/application-notes/AN279.pdf),描述了如何根据对相位噪声积分应用4[sin(pi* f * tau)] ^ 2权重因子,从相位噪声中估计周期抖动。加权因子主要是+20dB / dec高通滤波器,直到在半载波频率达到峰值。
事实证明,您可以使用类似的方法计算周期间抖动。这需要应用主要是+40dB / dec高通滤波器的{4 [sin(pi * f * tau)] ^ 2} ^ 2或16 [sin(pi * f * tau)] ^ 4加权因子,直到在半载频处达到峰值。这正是AN687所指的。
那么如何整合一个更清晰的HPF裙,使得周期间抖动大于周期抖动和sqrt(3)规则?
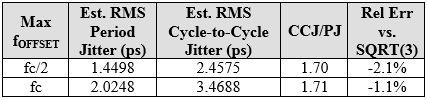
我不得不挖掘我在编写该应用笔记时使用的旧Matlab程序。幸运的是,我仍然拥有该文件和原始数据。然后我运行该程序的修改版本,并比较maxfOFFSET的结果,其中相位噪声数据集在fc / 2和fc处被扩展和截断。答案是,虽然周期到周期的HPF裙子更陡峭,但最大值也更高。看下面的情节。蓝色宽轨迹是周期抖动加权(滤波)相位噪声,红色宽轨迹是周期间抖动加权相位噪声。这是造成差异的更大的远偏移相位噪声贡献。
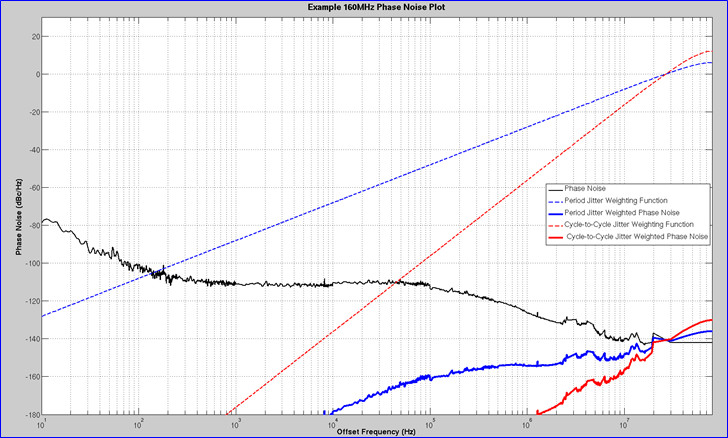
原始数据用于160 MHzCMOS振荡器,其在约2ps时具有示波器测量周期抖动。为了保守,正是出于这个原因,我经常比fc/ 2更进一步地进行整合。现在,示波器的噪声更低,找到待测试的原始设备并在更好的仪器上进行测量会很有趣。我的主要兴趣在于看sqrt(3)关系是否成立。正如你所看到的,两种情况下都遵循经验法则。
结论
我希望你喜欢这篇Timing 101文章。循环周期抖动的sqrt(3)经验法则在实验室,Excel电子表格模拟以及后处理相位噪声时都表现良好。
相关阅读:
秒懂时钟: 抖动衰减时钟设计与应用技巧 – Part 1
秒懂时钟-抖动衰减时钟设计与应用技巧 – Part 2
秒懂时钟-抖动衰减时钟设计与应用技巧 – Part 3 : Clocktoberfest
秒懂时钟-抖动衰减时钟设计与应用技巧Part 4: 拆分终端
秒懂时钟Part 5: PLL的VCO高通传递函数案例
秒懂时钟Part 6: 时钟相位噪声测量中的杂散
秒懂时钟Part 7: 探讨时钟相位噪声测量中的杂散(下篇)
本文转载自:SiliconLabs
声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有,如涉及侵权,请联系小编邮箱:cathy@eetrend.com 进行处理。