想写博客已经很久了,但由于项目时间紧,一直没有抽出时间来。不过这些都是借口,主要还是自己太懒。好了不多说了,因为这些天的项目中一直在用串口,所以就从串口开始写起。
首先总结一下串口232,422,485
串口232:可双向传输,全双工,最大速率20Kbps,负逻辑电平,-15V~-3V逻辑“1”,+3V~+15V逻辑“0”。
串口422:可双向传输,4线全双工,2线单工。
串口485:可双向传输,4线全双工,2线单工,最大速率10Mb/s,差分信号,发送端:+2V~+6V逻辑“1”,-2V~-6V逻辑“0”,接收端:+200mV逻辑“1”,-200mV逻辑“0”。
对于串口的实现有以两个方案:
方案一,和原子的《例说STM32》一样,首先接收,然后处理,没有消息验证处理,这样就会出现消息覆盖,消息出错后死机,无法明确区分命令,无法及时应答握手信号。方案二,借鉴uC/OSII的消息队列,进入中断服务函数之后,关闭中断,接收数据,如果没有数据接收,等待一段时间(时间和波特率有关)后开中断,出中断,然后在对接收到的数据进行处理,下面看代码:
消息队列及其初始化函数:
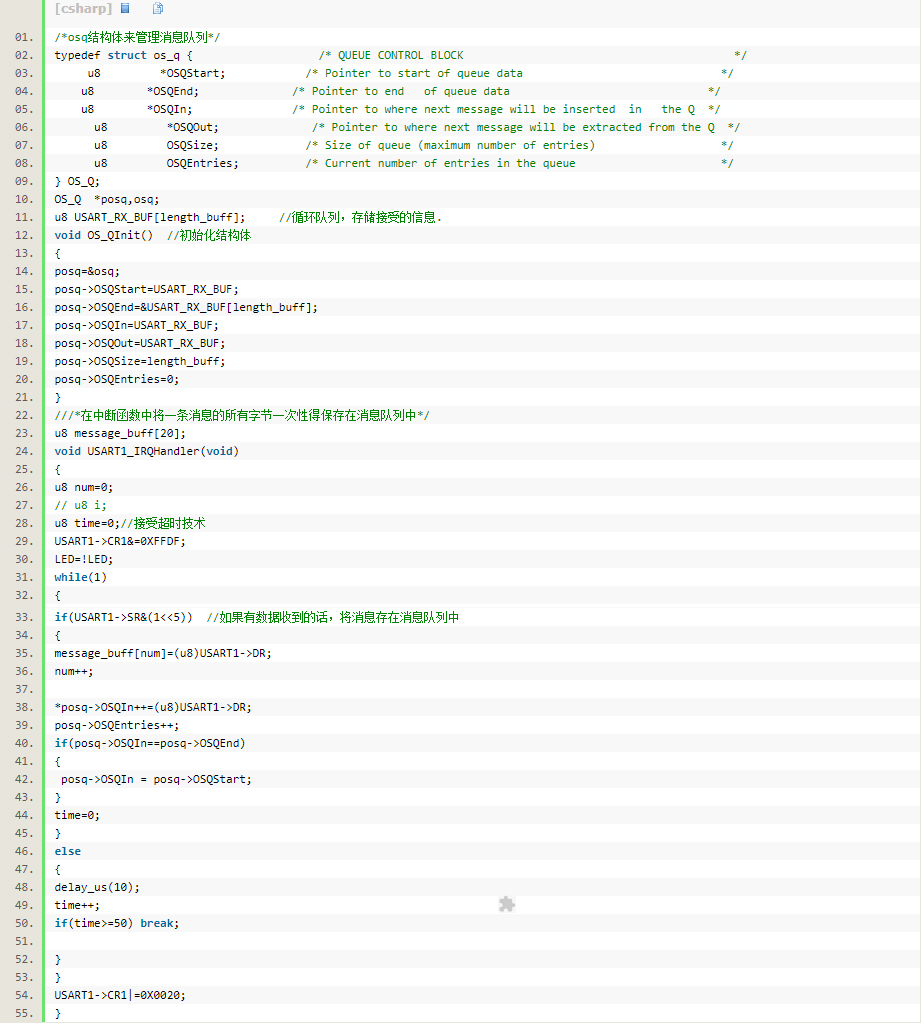
这样就把数据一次性全部存储下来了,剩下的就是对消息缓冲器message_buff[]中的消息进行处理了,这样就解决了消息覆盖,消息出错无法纠正的问题,至于消息怎么处理就是依据不同的需求不同的处理,另外注意,握手信号好用定时器中断。
本文转载自:zhitianya的博客
转载地址:http://blog.csdn.net/zhitianya/article/details/50349759#comments
声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有,如涉及侵权,请联系小编进行处理。