近年来伴随着应用计算机(微处理机)和集成电路的成果在汽车工业的广泛应用,汽车正逐渐从机械产品属性向电子产品属性演化!而当前正在轰轰烈烈进行的汽车“新四化”浪潮将催生汽车电子技术在信息通讯、电子电气架构、软件架构、处理器和传感器等五个方面发生变革。
汽车总线通讯从CAN总线向汽车以太网发展
汽车总线技术解决各个控制器之间的信息交互问题,目前汽车总线技术以CAN总线为主,LIN总线为辅。CAN总线具有多主仲裁的特点,但是它在每个时间窗口里只能有一个节点赢得控制权发送信息,其他节点在这个时候都要变为接收节点,因此CAN总线只能实现半双工通讯,最高传输速度1Mbps(40m)。为了获得更大的传输速度,BOSCH、freescale等公司开发了Flexray总线用于线控系统的数据传输,宝马、戴姆勒公司开发了MOST(多媒体传输系统)总线用于娱乐系统数据传输。
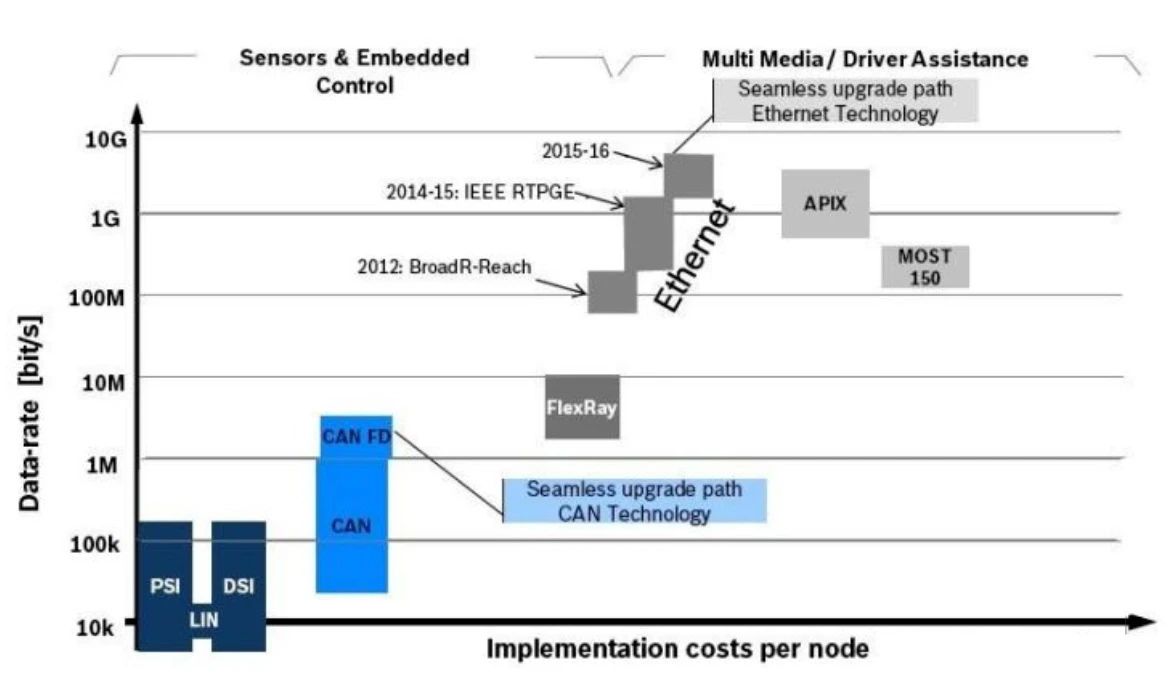
但随着汽车“新四化”的发展,ECU数量,ECU的运算能力需求都呈现爆发式增长,尤其是ECU与ECU之间对全双工通讯有了强烈需求,继续使用CAN总线连接不仅将造成汽车电子系统成本大增,更无法满足高性能处理器实时高速双向数据交互的需求。
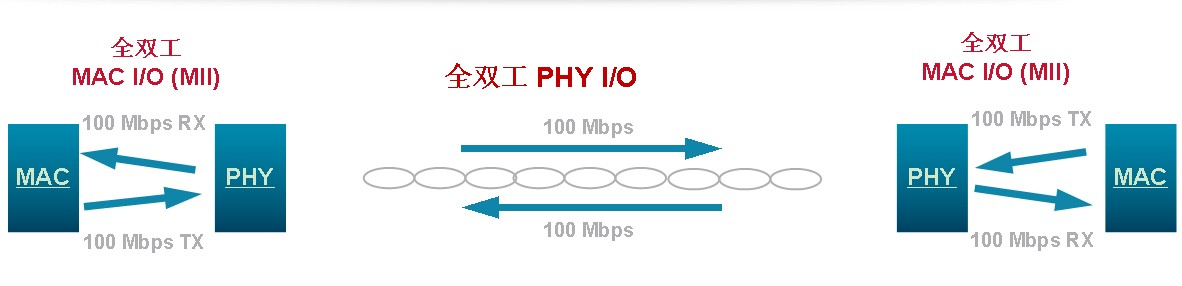
车载以太网使用单对非屏蔽电缆以及更小型紧凑的连接器,使用非屏蔽双绞线时可支持15m的传输距离(对于屏蔽双绞线可支持40m)。这种优化处理使车载以太网可满足车载EMC要求,可减少高达80%的车内连接成本和高达30%的车内布线重量。100M车载以太网的PHY采用了1G以太网的技术,可通过使用回声抵消在单线对上实现双向通信,满足智能化时代对高带宽的需求。
车载以太网短期内无法全部取代现有CAN网络,其在汽车行业上的应用需要一个循序渐进的过程,大致可分为3个阶段:局部网络阶段、子网络阶段、多子网络阶段。
局部网络阶段,可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于DoIP协议的OBD诊断、使用IP协议的摄像头等;
子网络阶段,可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于AVB协议的多媒体娱乐及显示系统、ADAS系统等;
多子网络阶段,将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用。
整车电子电气架构由分布式向集中式发展
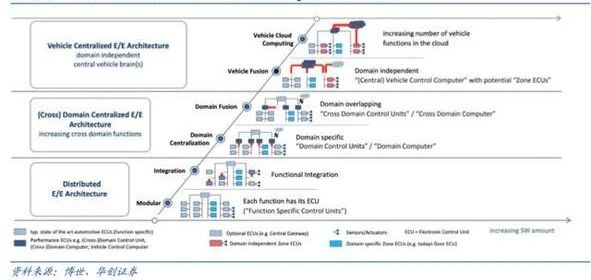
为了统筹考虑汽车的电子电气系统原理设计、中央电器盒的设计、连接器的设计、电子电气分配系统等设计,德尔福公司首先提出了整车电子电气架构(EEA)的概念。传统的电子电气架构是一种分布式方案,根据汽车功能划分成不同的模块,如动力总成、信息娱乐、底盘和车身等。这种分布式方案最大的特点是功能划分明确,可以通过预先的设计来严格明确界限,所有历史工作的继承性也很强。由于划分后的每个模块相对独立,如果需要做出改变,那么选出一部分东西进行更新即可。然而,这种模式的缺点也很明显,那就是容易导致模块太多且可控性不强。
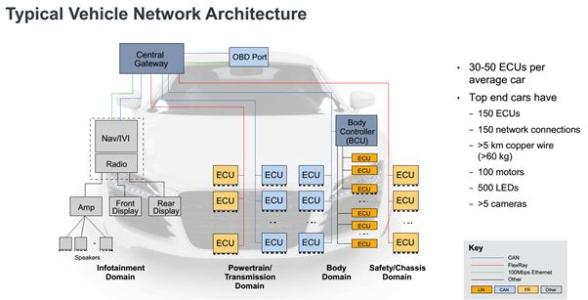
随着汽车“新四化”的发展,分布式电子电器架构设计已经不能满足需求。一方面现有的电子电气架构在功能扩展性这一块并不好,无法做到柔性兼容,每增加一个新功能都需要增加一套ECU和通讯系统,随着ECU系统数量和质量的增加,由于是分布式计算,大量的运算资源被浪费了,由此产生的成本增加大约300-500美元。如果沿用目前的电子架构体系,产生的成本增加最少也是1000美元。另一方面是线束系统。一辆低端车的线束系统成本只要大约300美元,重量大约30公斤,长度大约1500米,线束大约600根,1200个接点。而目前一辆豪华车的线束系统成本大约550-650美元,重量大约60公斤,线束大约1500根,长度大约5000米,3000个接点。如果沿用目前的电子架构体系,无人车时代的线束成本不会低于1000美元,重量可达100公斤。

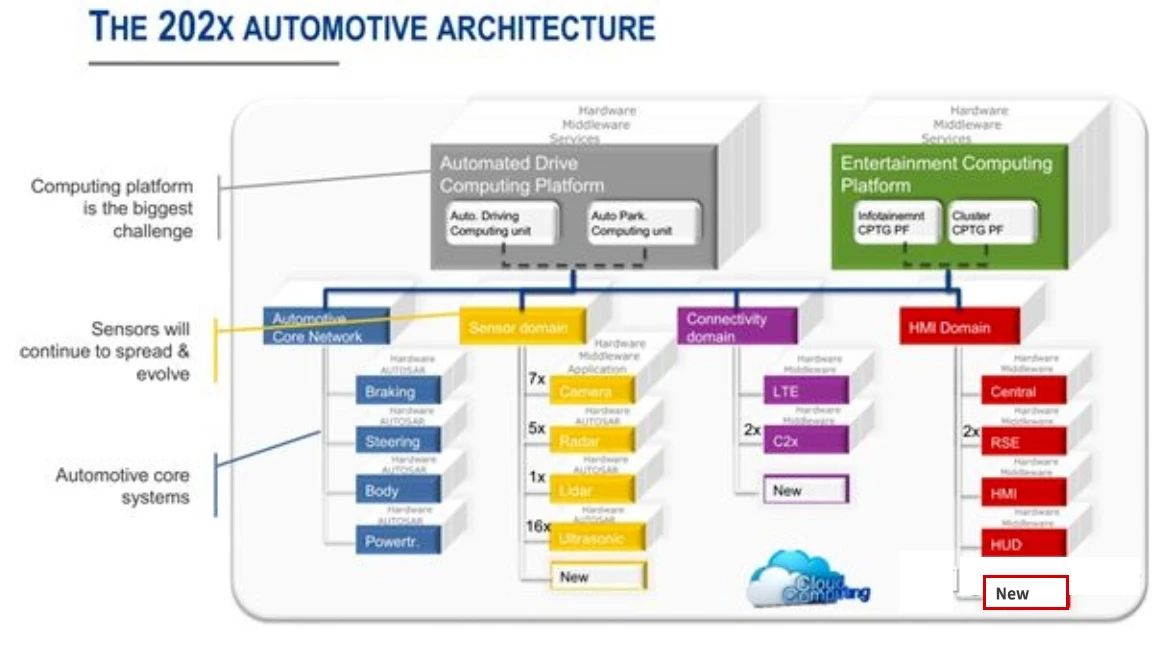
为了降低整车成本,汽车电子电气架构将由分布式向着集中式发展,其核心思想是用高性能的中央计算单元取代现在常用的分布式计算架构。奥迪将新架构命名为中央计算集群(central computing cluster),而宝马叫做中央计算平台(central computing platform),Tesla在Model3上首次使用了左车身控制器、右车身控制器、自动驾驶及娱乐域控制模块这三个控制器来控制整车电气系统,实现了域控制器概念。在通讯技术更加先进的未来,车辆的控制系统将放在云端,实现数据云传输和云控制,车辆硬件将简化成一个传感器和执行器,这样可以在降低成本的同时无限增加车辆功能的可拓展性。总之,汽车电子电气架构正围绕一个强有力的通信架构和整车级计算平台这两项内容而展开深度演化。
汽车软件架构由面向数据到面向服务发展
汽车软件与硬件共同实现了汽车某项功能。为了使汽车行业的各种软件能够兼容并协作开发,有利于提高汽车软件的开发效率,欧洲汽车行业在20世纪90年代中期开发了一套用于汽车电子的开放式系统标准--OSEK/VDX,这是用于分布式实时控制系统的一组标准,核心部分包括操作系统(OS)、通信(COM)、网络管理(NM)和OSEK实现语言(OIL)四个子标准。由于OSEK标准不支持在已有的硬件平台的基础上实现新的功能,急需开发一套新的标准可以将软件作为插件运行在电子控制单元上。
2003年全球汽车制造商、部件供应商及其他电子、半导体和软件系统公司联合建立了汽车开放系统架构(AUTOSAR)。AUTOSAR工作目标主要有三个:建立独立于硬件的分层软件架构,为实施应用提供方法论,包括制定无缝的软件架构堆叠流程并将应用软件整合至ECU,制定各种车辆应用接口规范,作为应用软件整合标准,以便软件构件在不同汽车平台复用。因此AUTOSAR整体框架为分层式设计,以中间件RTE(Runtime Environment)为界,隔离上层的应用层(Application Layer)与下层的基础软件(Basic Software)。中间RTE(Runtime Environment)作为虚拟功能总线VFB(Virtual Functional Bus)的实现,隔离了上层的应用软件层(Application Layer)与下层的基础软件(Basic Software),摆脱了以往ECU软件开发与验证时对硬件系统的依赖。另外AUTOSAR采用了静态驱动系统,在软件系统运行过程中,不同功能函数被事先定义好的排序文件(Scheduling)依次调用,逐个运行。优点是资源分配问题被事先一次性解决,每个函数的具体运行区间亦被提前锁定。这满足了对行车安全有苛刻要求的功能函数运行需求,比如决定安全气囊是否打开的功能函数被固定地每几毫秒运行一次,以便紧急情况下气囊得以及时打开。但它固定化的软件架构限制了使用者个性化开发的需求,且无法支持在线升级和软件迭代更新!
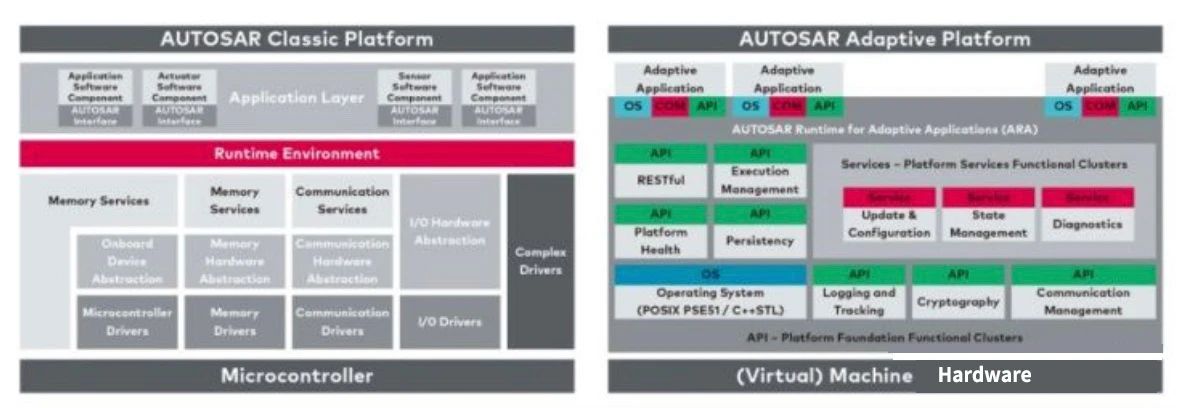
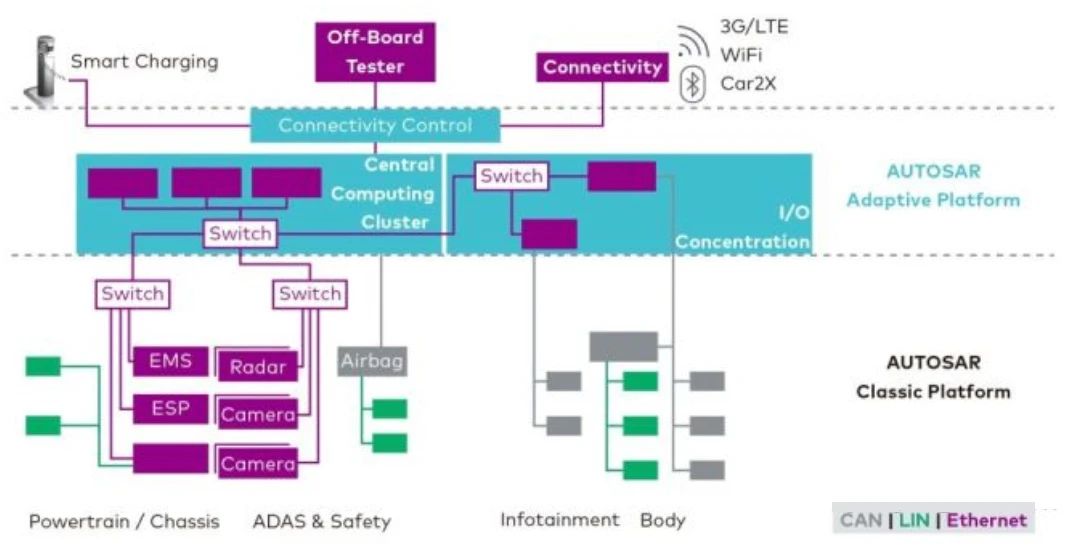
2017年3月AUTOSAR创立了适用Service Oriented Architecture的AdaptiveAUTOSAR标准。与经典平台相比,AUTOSAR自适应平台采用面向对象语言C++进行软件开发(经典AUTOSAR采用C语言),基于智能操作系统(POSIX OS,例如Linux)进行APP的开发,使得它可以适应高性能微处理器(如ARM)和智能操作系统(如Linux)的智能互联应用功能的开发。因此,在未来的车辆上,传统应用如动力总成、底盘、车身和内部电子控制等仍将使用AUTOSAR经典平台,对于新应用,如高度自动化驾驶、V2X、空中软件更新或网联,将使用AUTOSAR自适应平台。
汽车电子控制器由MCU向AI仿真芯片发展
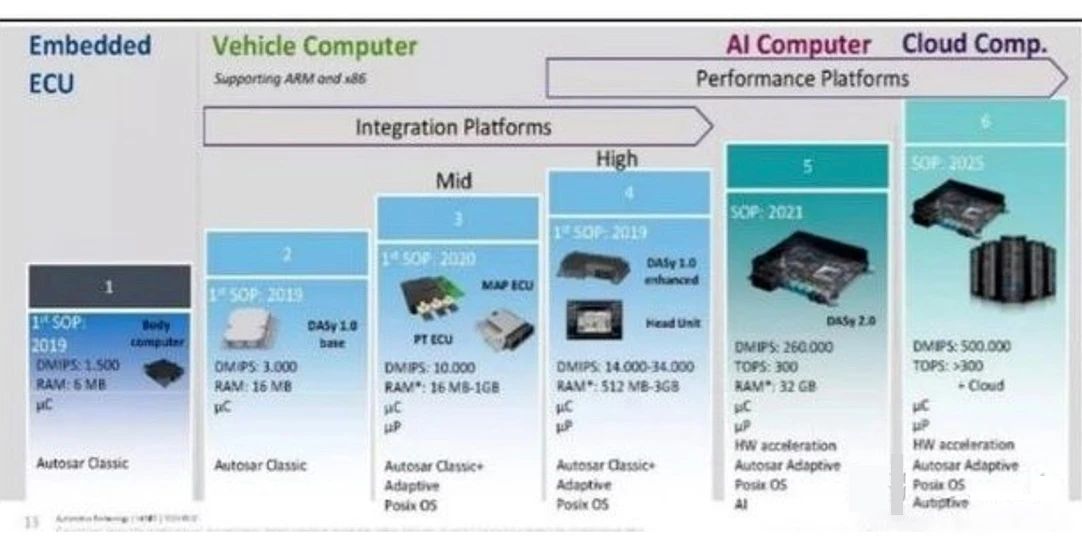
传统汽车功能简单,与外界交互较少,常为分布式ECU,主要为等待指令、停机指令、空操作指令、中断指令等各类控制指令,运算速度较低,其运算单位为DMIPS(百万条指令/秒)、且存储较小,代表厂商如英飞凌、瑞萨、德州仪器、恩智浦、意法半导体等;
智能网联汽车,不仅需要与人交互,也需要大量与外界环境甚至云数据中心的交互,将面临巨大的非结构化数据处理需求,车端中央计算平台将需要500+DMIPS的控制指令运算能力、300+TOPS的AI算力。因此汽车芯片结构形式由MCU向SOC异构芯片方向发展。SoC是一颗系统级芯片,由CPU+GPU+DSP+NPU+各种外设接口、存储类型等电子元件组成。SOC较MCU集成程度更高,集成AI处理单元/音频处理单元DSP/图像处理单元GPU/深度学习加速单元NPU等,功能更复杂,片上互联利于集成电路之间的高速互通互联,资源利用效率更高。SOC芯片上有丰富的软件配套(工具链、编译器等),提升了处理效率。车载SOC芯片代表产品如华为昇腾系列芯片、地平线征程系列芯片、寒武纪的MLU系列芯片、特斯拉FSD等。
汽车传感器向着融合智能的方向发展
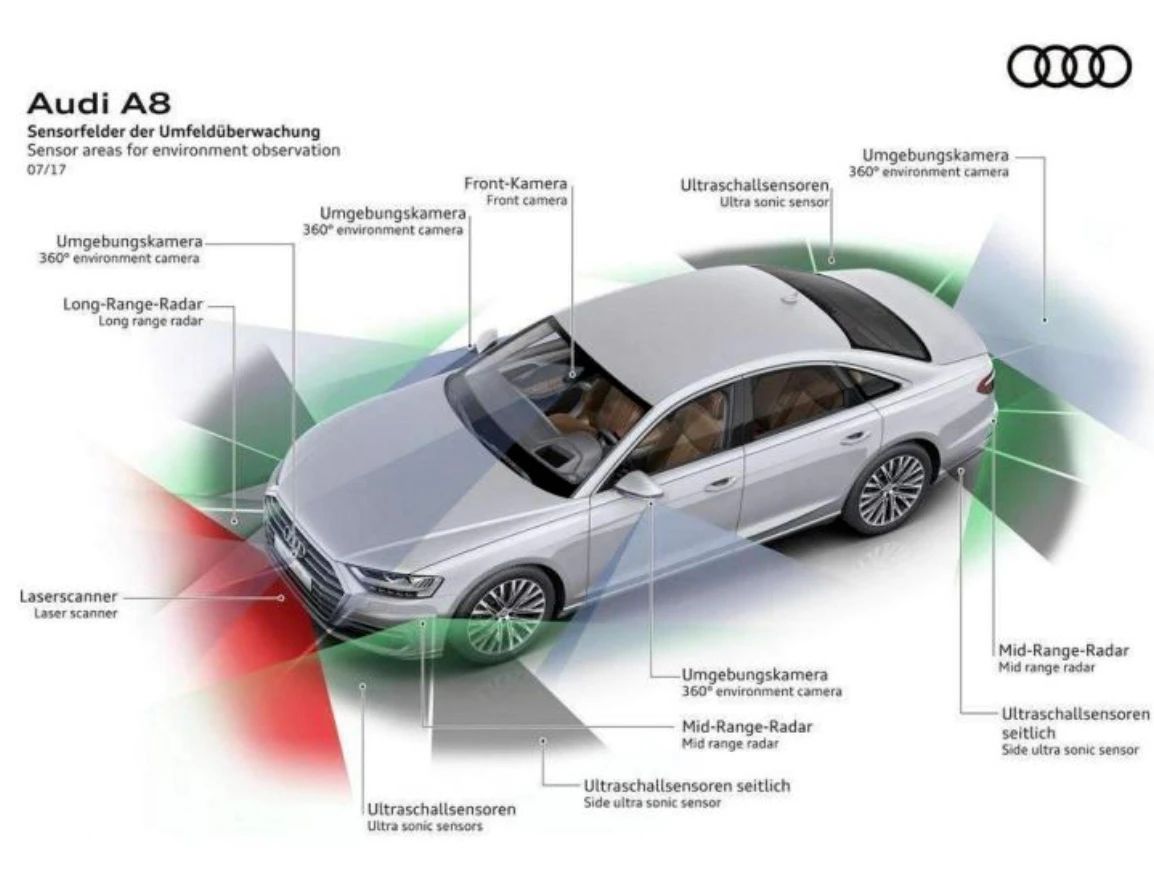
传感器在汽车上的应用越来越广泛,随着汽车网络化、信息化发展,传感器从传统只能检测一个物理量逐渐发展为可以同时测量多种物理量,与微处理器相结合使传感器具有信息检测、信息处理、自学习能力等智能功能。
传感器融合是指将安装在各位置的多个相同种类或者不同种类的传感器所提供的阶段性数据进行综合,采用程序软件对其进行分析、判断、过滤、修整,去除多个传感器信息之间存在的冗余、矛盾,并进行互补、修正,降低其不确定性,获得被测对象确定的描述,最大限度提高系统的决策、规划、反应的快速性和正确性,使系统获得更充分的信息。数据融合增强了系统的稳定性、精确性和健壮性,延展了搜索范围,提高了实时性或空间的分辨率,扩大目标特征的维度,加强了信息的全面性、准确性,改善了信息的可信度,增强了系统的防错能力和自学习能力,同时也能够解决信息泛滥的问题,从而提高整个系统的性能。
以上就是作者对汽车电子未来发展趋势的看法,随着信息技术不断演化,汽车电子日益成为汽车变革的核心,谁抓住汽车电子的发展脉搏,谁就抓住了未来!在这场技术实力博弈中,哪些企业最终能够脱颖而出,笑到最后,让我们拭目以待!
本文转载自:汽车电子与软件
作者:cao sir
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理(联系邮箱:cathy@eetrend.com)。





