作者:Traci Browne、Paul Golata(贸泽电子)
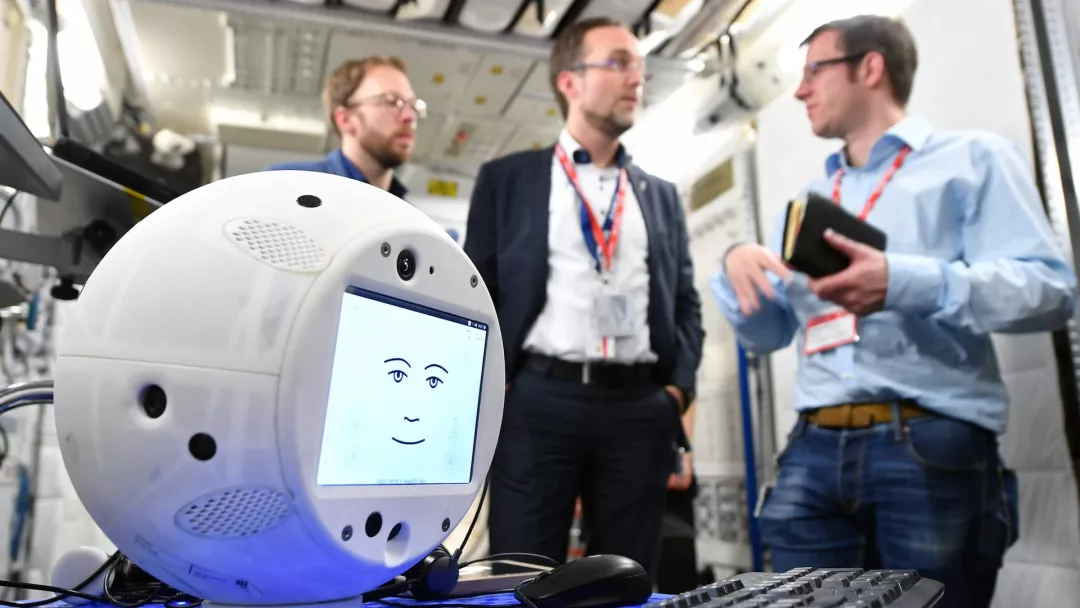
在过去20年的时间里,国际空间站接待过225多名来访者。2018年6月,其中一名到访者是一个可以自由漂浮飞行的自动化服务机器人,它的名字叫“CIMON”,全称是“交互式宇航员助手”。它是一款直径有320mm,重5Kg的球形机器人大脑。它能够说话、听、看以及理解人类说的话。CIMON是一款塑料球形的人工智能(AI)助手。
实际上CIMON的设计灵感来自于西蒙·莱特教授在1978年的卡通系列《未来队长》中扮演的角色(一个会飞行的机器人大脑)。就像是科幻世界中的未来船长一样,CIMON负责协助宇航员亚历山大·格斯特(Alexander Gerst, 1976-)在国际空间站哥伦布实验舱的一些活动。
CIMON是由空客公司代表德国航空航天局中心开发实现的,主要是协助宇航员Gerst完成三个不同的任务,同时这款机器人也是一个协作机器人。这三个任务包括解魔方、用晶体做实验以及拍摄医学实验。CIMON甚至还可以作为一个复杂的数据库,存储有关国际空间站上的实验和设备操作与维修过程的必要信息。如果想拍摄一组视频说明,CIMON也可以帮忙处理。
微重力的设计
虽然这个设计是受到科幻小说的启发,但是球形设计在微重力环境中有更加实际的应用(下图)。“主要的挑战是创造一个宇航员们都能够接受的机器人。” 空客公司项目经理Till Eisenberg表示。
“空间站里面的一切都是长方形的,它是一个充满高科技的环境,我们希望有一个平衡点”,Eisenberg说道。
CIMON可以成为平衡系统的一个焦点,同时让宇航员的工作变得更易于管理,这是非常重要的。Judith-Irina Buchheim是德国慕尼黑路德维希马克西米利安大学医院的一名研究人员,他认为CIMON为宇航员提供帮助并减少他们所面临的压力。此外,研究人员相信这对人类的免疫系统也有影响。这种简单的球形设计与国际空间站内四四方方的技术环境形成鲜明的对比,但是也有其他的优势。
因为CIMON是第一个可以在国际空间站内自由飞行的机器人,所以安全是非常重要的问题。通常微重力环境下的规则是所有东西都必须进行固定,以防止物体四处漂浮,进入它们不应该进入的地方。Eisenberg说道,锋利的边角设计会带来危险,因为它会在国际空间站内漂浮,可能会撞到墙壁、设备或者宇航员。
尽管CIMON的外形设计不会伤害到任何人,但是可能会在拥挤的空间内和工作中的宇航员相互碰撞,这也许会让宇航员感到厌烦。为了避免这种情况,CIMON集成了12个超声波传感器,使其能够探测到障碍物并感知不断靠近的物体,这些传感器能够实时测量障碍物或宇航员到CIMON的距离。
内部集成了14个风扇使得CIMON可以在所有空间方向上进行移动和旋转,在CIMON移动的过程中集成的双3D摄像头传感器能够采集关于深度和不同特征之间关系的信息,并且会基于同步定位和映射(SLAM)算法构建出地图,集成的一个前置摄像头和人脸识别软件将会聚焦在Gerst的眼睛上,使得CIMON能够自动定位来模拟眼神之间的交流。
如果Gerst想要吸引CIMON的注意力,当CIMON正做其他事情时,比如看着窗外欣赏风景,Gerst可以朝着CIMON的方向并与CIMON交谈。一组麦克风阵列会探测到Gerst发出的声音,此时CIMON会调整自己的方向,直到讲话者进入其摄像头的视野范围内,这时就会产生眼神上的交流。
在最后一次的测试中Eisenberg和CIMON一同登上空客A300零重力(Zero-G)飞机进行抛物线飞行测试,Eisenberg称这次飞行是一次很棒的经历,是每个人都应该尝试的事情。飞机会以45度角起飞然后以45度角下降,过程中会形成微重力的环境,这个阶段大约会持续约20秒。典型的抛物线飞行测试每次飞行大约要进行30次。
精彩内容未完待续......
原文链接:
https://www.mouser.cn/applications/cimon-says-space-robot-lessons/
该发布文章为独家原创文章,转载请注明来源。对于未经许可的复制和不符合要求的转载我们将保留依法追究法律责任的权利。





