在持之以恒的实现高通道密度的努力中,许多系统设计师在寻找使用较少电路板面积,但仍能达到严格性能标准的数据采集解决方案。ADI直面这些挑战,推出首个μModule®数据采集系统系列——ADAQ7980和ADAQ7988。ADAQ798x系列将常见信号处理和调理模块集成到系统化封装(SiP)设计中,支持高通道密度,可简化设计过程,并提供出色的性能。
如何使用集灵活性和高集成度于一身的全能ADC—— μModule数据采集系统ADAQ798x系列呢?ADI工程师为此撰写了6篇博客,目的是帮助系统您充分利用ADAQ798x系列的灵活前端,并说明它可以如何配置以适应不同应用。
今天,我们先来看看该系列博客的前两篇:
为何要配置ADC驱动器?
ADC驱动器用于调理输入信号,并充当信号源与SAR ADC开关电容输入之间的低阻抗缓冲器。ADAQ798x的ADC驱动器采用“两全其美”的办法,不仅具备信号链集成优势,而且提供设计灵活性,支持很多不同的应用。
ADAQ798x中集成ADC驱动器可减少电路板面积,免除(有时令人畏惧的)选择合适放大器的任务。但是,ADC驱动器配置仍很灵活,因为其输入和输出直接路由到器件上的引脚,允许增加外部无源元件实现增益、滤波等。使得ADAQ798x能够支持多精密应用中的信号幅度和带宽。
我们将在后续的内容中讨论ADAQ798x的几种常见ADC驱动器配置方案。但在具体了解这些配置的详情之前,让我们明确许多应用关于ADC驱动器的一些常见设计考虑。
输入电压范围
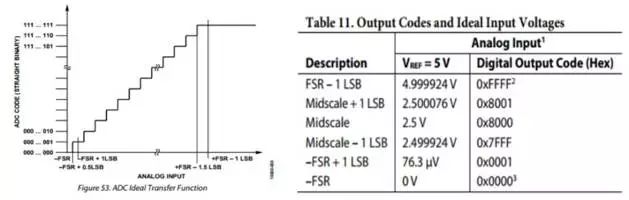
ADAQ798x集成ADC将0 V至VREF的单极性单端信号转换成16位结果。VREF为基准电压,其是在外部产生,可在2.4 V至5.1 V范围内设置。必须配置ADC驱动器以转换输入源的输出范围,使其适合集成ADC的输入范围。
ADAQ7980/ADAQ7988数据手册给出了ADC驱动器在单位增益配置下的性能,其中IN+引脚的电压输入为0 V至VREF。这种配置是最简单的设计(仅需要将IN-与AMP_OUT引脚短接起来!),可实现最佳噪声性能和功耗,但并非总是可行,因为很多传感器和信号源不符合ADC的输入范围。
例如,工业应用常常涉及幅度高达20 VPP的双极性信号!幸运的是,只要增加几个无源元件,便可实现增益、衰减、单极性到双极性转换和有源滤波,使信号链可能无需使用其他放大器。
注意事项
在未来的文章中,随着对配置方案的深入探索,我们需要牢记一些关键设计注意事项。例子包括:
-
功耗
-
系统噪声
-
大信号和小信号带宽
-
建立特性
-
失真
-
失调误差
-
增益误差
每种应用对每个参数有不同的要求,但所有参数皆受ADC驱动器配置和所用元件影响。例如,使用大值电阻通常会降低功耗并提高输入阻抗,但会增加系统噪声、失真、失调和增益误差。我们将在未来的文章中考察与具体配置相关的各个参数。
如何与小于ADC输入范围的单极性输入源接口?
正如上述所说,ADAQ798x集成ADC驱动器的多种常见且有用的配置方案,如何进行设计,以及需要注意什么。接下来我们讨论下如何使用常见的同相配置来让ADAQ798x与小于ADC输入范围(0 V至VREF)的单极性输入源接口。
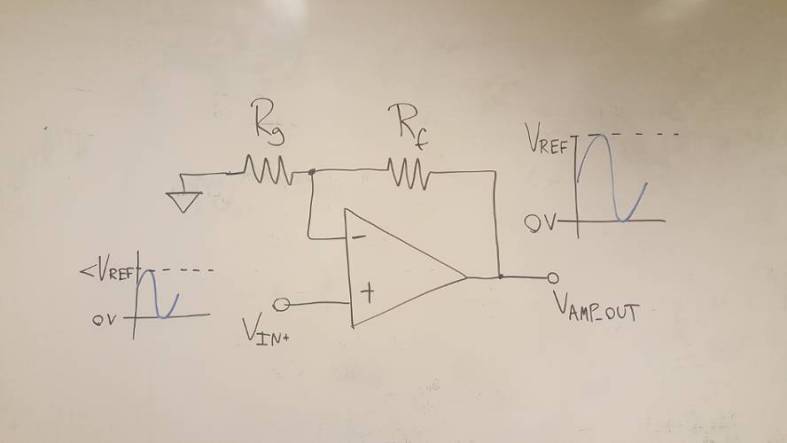
同相配置
ADC转换0 V和VREF之间的输入,意味着ADC驱动器的输出范围也必须是0 V到VREF,系统才能利用ADAQ798x提供的全部216个码。ADAQ798x集成ADC驱动器可提供增益来使幅度较小的信号得到必要的扩大。
这就要用到同相配置。此配置为单极性信号提供增益,提供高输入阻抗,只需增加两个电阻。
很多系统设计师已经知道同相配置的工作原理,但我们将结合ADAQ798x予以讨论,并了解该配置如何影响系统的关键性能参数,包括系统噪声、信噪比(SNR)和总谐波失真(THD)。
第一、给定应用的输入范围和基准电压
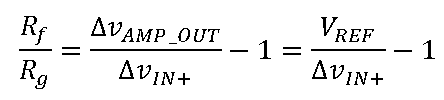
如何选择电阻Rf和Rg?ADC驱动器输出端的电压(vAMP_OUT)为:
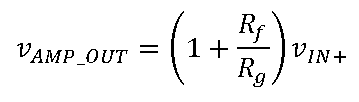
vAMP_OUT在0 V和VREF之间,Rf和Rg之比很容易根据应用的输入范围(vIN+)进行计算:
算出Rf和Rg之比后,必须选择其具体值。这些电阻的“恰当”值取决于应用,并且必须考虑系统噪声性能与功耗、失真、放大器稳定性的平衡。Rf值越低,则噪声越低,但从ADC驱动器输出端吸取的电流会增大(功耗提高)。使用较大Rf值可限制此功耗,但会增加系统噪声并可能造成不稳定问题。
第二、电阻产生的噪声量与其阻值成正比
较大电阻会贡献较多噪声,并且可能影响系统的本底噪声和交流性能规格(比如SNR)。系统总噪声为电路中各噪声源的和方根,包括电阻、ADC驱动器和ADC本身的噪声:
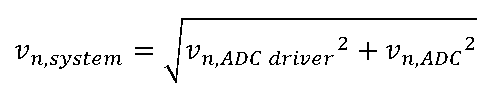
其中,vn,system为系统有效值本底噪声,vn,ADC driver为ADC驱动器电路的总噪声(包括外部电阻),vn,ADC为ADC本底噪声规格。
ADAQ7980/ADAQ7988数据手册中阐述了如何计算vn,ADC driver(参见噪声考虑和信号建立部分);对于5 V基准电压,算出vn,ADC为44.4 μVRMS。参考电路《库隔离、2通道、16位、500 kSPS同步采样 信号链,集成数据采集系统》中还说明了如何根据系统总噪声计算系统的预期SNR(参见系统噪声分析部分)。为了简洁起见,我们不会在这里重复那些计算,但会再举一个例子。
举个例子
我们来考虑这样一种情况:ADAQ7980需要与一个输出范围为0 V至2.5 V的传感器直接接口,采用5 V基准电压。由于传感器的输出幅度等于ADC输入范围的一半,所以ADC驱动器的增益应设置为2。这要求Rf等于Rg,但Rf的选择有一定的灵活性。
首先来看看不同的Rf(和Rg)值对系统本底噪声和相应的预期SNR有何影响:
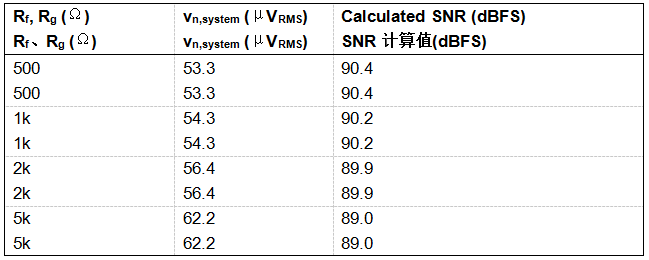
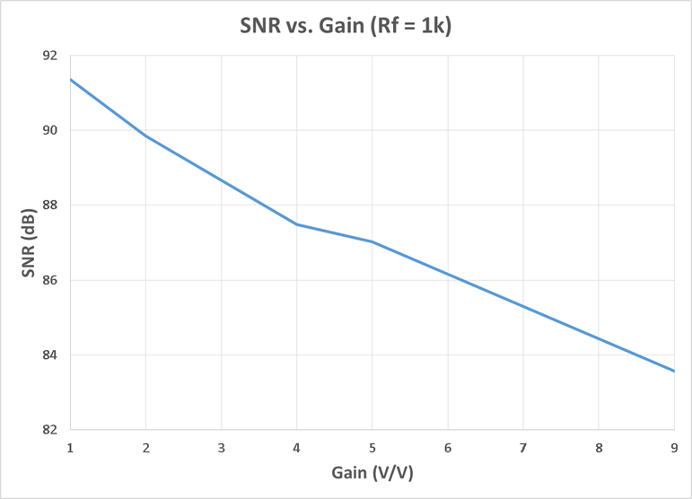
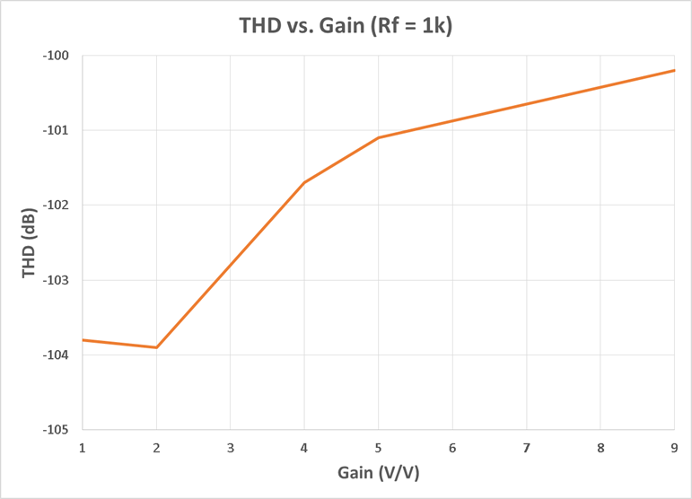
可以看到,使用较高的Rf和Rg值时,系统噪声会提高,SNR会下降。提高增益也会降低SNR性能,因为它会提高ADC驱动器输入电压噪声和Rg贡献的有效噪声。下面的曲线显示了不同增益下实测的SNR和THD(总谐波失真)结果,Rf = 1 kΩ(输入频率 = 10 kHz)。
不过,选择较小电阻的缺点之一是ADC驱动器需要通过反馈网络输送更多电流(因而功耗增加)。通过Rf和Rg的瞬时电流等于vAMP_OUT除以Rf与Rg之和。此电流会加到系统总功耗上,在低功耗应用中应予以限制。
结语
这种配置的一个优势是其输入阻抗非常大,因为信号源直接连到ADC驱动器的同相节点。这对输出阻抗非常大的信号源特别有用。我们会看到,对于其他配置,情况并非总是如此。
虽然同相配置可提供增益,但也有一些实际限制。首先,正如《模拟对话》文章《精密SAR模数转换器的前端放大器和RC滤波器设计》所述,ADC驱动器必须维持一定的大(和小)信号带宽以满足ADC的正向(和反向)建立要求。带宽与闭环增益成反比。系统噪声也会随着增益提高而提高,在某一点时,性能会降低太多,只有进行相当程度的滤波才可行(我们将在后续连载中讨论)。
另外,对于要求极低失调和增益误差与漂移的应用,务必使用具有适当容差和TCR规格的精密电阻。如可能,应使用指定了各电阻间阻值和TCR的跟踪精度的匹配电阻网络(例如LT5400系列)。参考电路《库隔离、2通道、16位、500 kSPS同步采样 信号链,集成数据采集系统》 详细探讨了这一概念。还应注意,ADC驱动器的输入偏置电流会流经Rf和Rg,这会引起系统的电压失调。可在ADC驱动器的同相节点与输入源之间放置一个电阻以抵消此类失调,但应注意,此电阻也会增加系统噪声!
本文转载自:亚德诺半导体
转载地址:http://mp.weixin.qq.com/s/aC0TBnZiHKIFQQDQc0zltw
声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有,如涉及侵权,请联系小编进行处理。