支持摄像系统的吉比特多媒体串行链路(GMSL)
提高道路的识别度是驾驶员安全驾驶以及未来自动驾驶系统的关键特性。Maxim的串行器/解串器(SERDES)产品拥有可靠、小尺寸等优势,可灵活构建通信链路,支持高性能摄像系统。MAX967xx系列拥有众多新功能,充分显示了Maxim在未来安全、智能汽车设计领域的技术优势。
随着汽车领域ADAS技术的不断进步,道路安全性也大幅提高。有些技术自动生效,在特定事件下完全控制车辆(表1)。

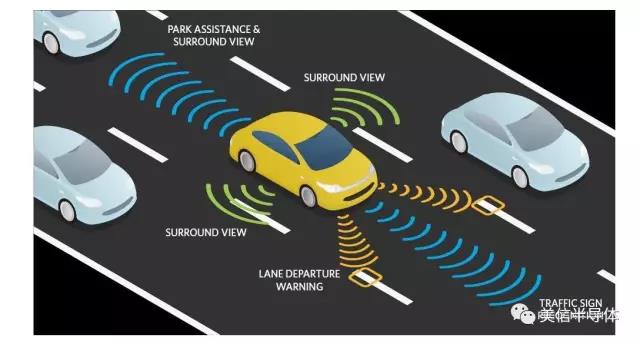
其它技术则为车上人员提供信息,例如盲点检测,汽车则仍由驾驶员控制。随着自动驾驶概念持续发酵,人们更加关注驾驶员和乘客的安全性。ADAS技术越来越依赖于分布在全车中的摄像头(图1)。
图像单元要求
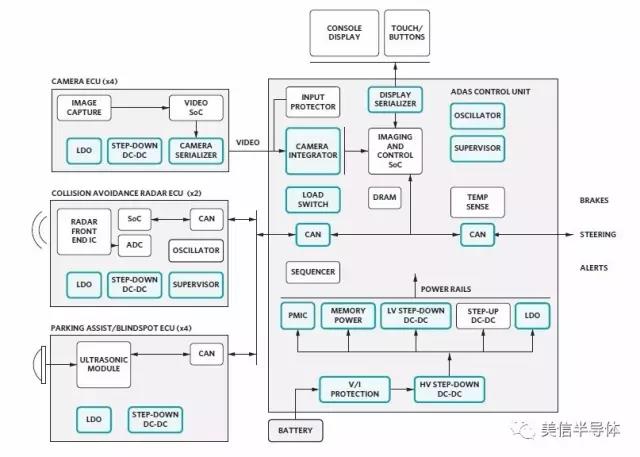
ADAS应用与摄像头(图2)紧密相关,关键设计挑战是快速、高效地将图像数据从摄像头传输到处理单元,并从处理单元传输至每个显示屏。设计ADAS摄像系统时,需要对图像质量、带宽、延迟、可靠性、成本和功耗等关键因素进行权衡、折衷。
-
带宽—用途不同,对每台摄像机的性能要求也不同。例如,采用广角镜头的倒车辅助摄像头可能具有130万像素、每像素18位颜色,速率为30fps。包括控制位和平衡编码,单台摄像机将产生1Gbps以上的数据流!
-
响应时间—为62.5mph (100km/hr),汽车每秒行进27.8m (91.13 ft)。对于乘客和交通安全而言,每一秒钟都至关重要。
-
可靠性—为保证一切平稳运行,针对车辆有效使用期内的磨损做出自适应调整,在维护时进行检测是必不可少的。
-
功耗—随着车辆中电子系统的增多,将功耗控制在电池容量及配电限制范围以内也越来越困难。
-
成本—为保证系统成本足够低的条件下仍可获取技术竞争优势,在减少元件数、电缆长度的同时,增强系统功能至关重要。
-
影像质量—基于视觉的ADAS,其目标检测与图像处理能力密切相关,因此高质量影像是基本保障。
推动设计创新
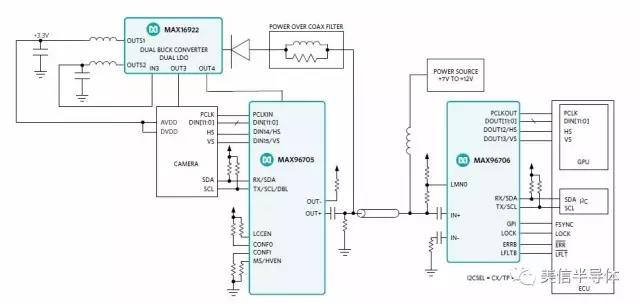
Maxim Integrated最新推出的SERDES产品可有效增强系统可靠性和设计灵活性,适合非压缩摄像头的图像传输。SERDES芯片接收图像传感器的非压缩、并行视频输出,将其与控制信号输入进行组合,然后串行转换为单路高速输出,通过电缆传输图像数据;在解串端将接收到的信号转换为原始的并行视频输出。许多系统设计在同一电缆上双向传输高速数据并提供供电。MAX967xx系列针对ADAS应用提供新增功能,确保系统的安全性和可靠性(图3)。
MAX967XX支持ADAS应用的特性
1. 控制通道误码检测和重传
确保链路配置100%准确
确保控制链路访问的外设可靠通信
2. 交叉切换
任意并行输入至任意并行输出
支持单主板连接多摄像头模块
支持单摄像头模块连接多主板
3. 降低EMI/EMC
可编程输出扩频
为解串器提供输入时钟展宽能力
高抗扰性工作模式,确保控制通道的EMC容限
4. 增强电缆驱动
50Ω同轴电缆或100Ω屏蔽双绞线
可编程预加重和去加重支持长达15m电缆的全速传输
提供线路故障监测
5. 眼图宽度监测和自适应均衡
内置电缆均衡器,支持长电缆驱动
眼图宽度监测,可触发均衡器重新调整
6. 可接受高达1.74Gbps的数据输入
12.5MHz至87MHz @ 14位输入 + HSYNC和VSYNC
36.66MHz至116MHz @ 12位输入 + HSYNC和VSYNC
7. AEC-Q100认证
8. 专用帧同步GPO
本文转载自美信半导体





