作者:Bill Schweber, Mouser Electronics
相比如何选择mos管和驱动器,控制器型号的选择也很富有策略性,并且需要在对具体供应商和款式的选择之前作出决定。这是因为在选择是使用一个仅作电机控制的通用可编程处理器,还是使用一个高计算能力的FPGA,抑或是使用一个专用的控制IC电路(后者通常出自特定的电机控制供应商)时有许多需要权衡考虑的地方。设计师需要考虑的一些点包括:
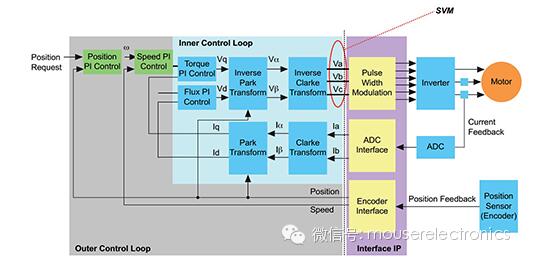
• 你需要何种复杂度的控制算法,有多少I/O口?比如说,FOC控制算法涉及多重并行计算的复杂转换,因而需要高级功能模块(图6)。
• 如果使用一个通用可编程IC或者FPGA,谁来提供控制算法及代码:是IC供应商,还是第三方合作伙伴,还是不相关的第三方开发者?他们如何确认并验证电机及其应用的性能?
• 如果使用一个专用预编程控制IC,那会不会提供所有我们需要的功能和特点?
• 你需要或想要多少用户编程能力?即使是专用的、不需要编程的控制器,也会要求用户去选择算法类型、闭环控制模式(位置,速度,或加速度),并且需要设置一些操作变量如时间常数和可允许误差范围等。
• 有改变和修改基本算法的需要?或者电机和应用有独特的属性要设置吗?如果答案是肯定的,那选择可编程IC会更好。相反,如果有需要不断修改算法的担心,这种情况下,相比完全可编程的IC,选择带有硬连线、固化算法的专用IC会比较好。
• 控制器需要支持一种还是多种电机型号?即便是同一种,控制器是只支持该型号中某种尺寸的电机,还是支持一系列范围尺寸?
• 供应商提供何种程度的技术支持?他们有多少实际动手开发的电机经验?他们会不会提供曾经搭建且验证过的具体参考设计,包括控制IC和mos管驱动器间的接口电路?
• 是否有一些监管问题需要注意?如授权能效(许多电机应用现在必须“绿色”环保要求)。如果是,供应商理解这些问题吗,并且能以他们的元器件和算法满足这些要求吗?
芯片和电路板实例显示控制器、接口性能
对于许多工程师来说,将所有的部分—包括带有固化或独立算法的控制器、驱动器、还有MOS管等融合到一起,这将是一个多学科任务,一个他们不想“从零开始”的任务。出于这个缘由,许多电机控制IC供应商提供包含了控制器、算法、驱动器和MOS管的评估板甚至是完整的可交付板。
举个例子,Applied Motion Products公司1240i是款可编程的步进电机驱动器,适合在一系列的动作控制应用领域使用(图7)。它有一个集成了50瓦细分控制放大器的复杂控制器,可以和步进电机直接相连,能提供高达1.2安的可编程电机电流,速度能达50转/秒。

不同的改动可适用于处理不同版本的标准步进电机和不同的接口。使用供应商提供的动作控制开发包和一台标准PC机,用户可通过编程来把这块板配置成一个独立的动作控制器。该板也能被主机或可编程逻辑控制器(PLC)实时控制。
机器人有光明的前景。传感、控制和电机这些关键领域的革命将持续影响机器人技术的变革。
使用流体动力?
使用压缩流体是使用电机外机器人动力的另一选择。压缩流体有两种形式:基油液压和基于空气的气动。基于液压的动力在大动力应用中有很长的历史,比如掘土设备,并且由于原理简单,其很长一段时间被用在早期自动组装线机器人上。然而,液压促动器需精心集成液压设计和元件的电子控制单元,同时还要加上一个电力供应压缩机/泵。更糟糕的是,由于不可避免的密封泄露问题、维修(同时需要电子和液压技术人员)的复杂性、泄露带来的环境后果等等因素,使得液压传动成为万不得已的选择,或者说有对环境噪声(EMI或RFI)敏感的担忧时,我们可以使用它。
另外一些低动力的应用中,我们使用压缩空气的方法,特别是担心受到EMI/RFI和ESD影响的时候。基于气体的系统没有潜在的液压流体的问题,但是他们不能在既定体积下提供足够的动力,因此压缩空气所需的供应线相对比较笨重。和基油液压传动一样,气动系统也存在泄露问题,而且很难定位出泄露点,并且需要多学科的知识来设计、安装和维修。尽管如此,它们仍是在只需要满足基本、快速和来回动作等要求时的可行选择。
由于强动力电子电机和它们控制器的不断发展,许多先前使用液压的应用已经被更新换代了,除非有其它可信的技术原因来维持使用液压。对于新的设计,特别是小到中型机器人设计情形时(甚至是一些大型机器人的设计),首选使用电子控制和电子电机。这并不意味着液压系统已经过时了,因为在高速度,高冲击,高动力冲击领域,对于液压与气压仍有需求。金属锻造站冲压(液压)和航母启动弹射器(蒸汽和空气)就是很好的实例。
作者简介

Bill Schweber 是一位电子工程师,撰写了三本电子通信系统教材,以及数百篇技术文章,意见专栏稿件和产品说明书。他曾经从事过 EE Times多个主题的技术网站经理,以及EDN的执行主编和模拟主编。
在ADI公司(模拟和混合信号IC的领先供应商), Bill 负责营销传播(公共关系);因此,他一直扮演技术PR的两种不同角色,一方面展示公司的产品以及理念,并给媒体传达信息,另一方面也从他们中接收反馈意见。
在为Analog做市场传播的之前,Bill是他们备受推崇的技术杂志的副主编,同时也做过产品营销以及做过应用工程团队的工程师。而在这之前,Bill工作于Instron公司,做手工模拟与电源电路设计和材料测试机控制的系统集成。
他拥有电子工程硕士学位(Mass大学)和电子工程学士学位(哥伦比亚大学),是一位注册专业工程师,并拥有高级班业余无线电证书。Bill还从事包括MOSFET基础知识、ADC选择、驱动LED在内的各种工程主题的策划、编写和在线课程传授。