01、什么是步进电机?
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。

步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装。
02、步进电机的特点:
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。

步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。优缺点如下所示。
优点
1. 电机操作易于通过脉冲信号输入到电机进行控制;
2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);
3. 由于没有接触电刷而实现了更大的可靠性。
缺点
1. 需要脉冲信号输出电路;
2. 当控制不适当的时候,可能会出现同步丢失;
3. 由于在旋转轴停止后仍然存在电流而产生热量。
03、步进电机的分类:
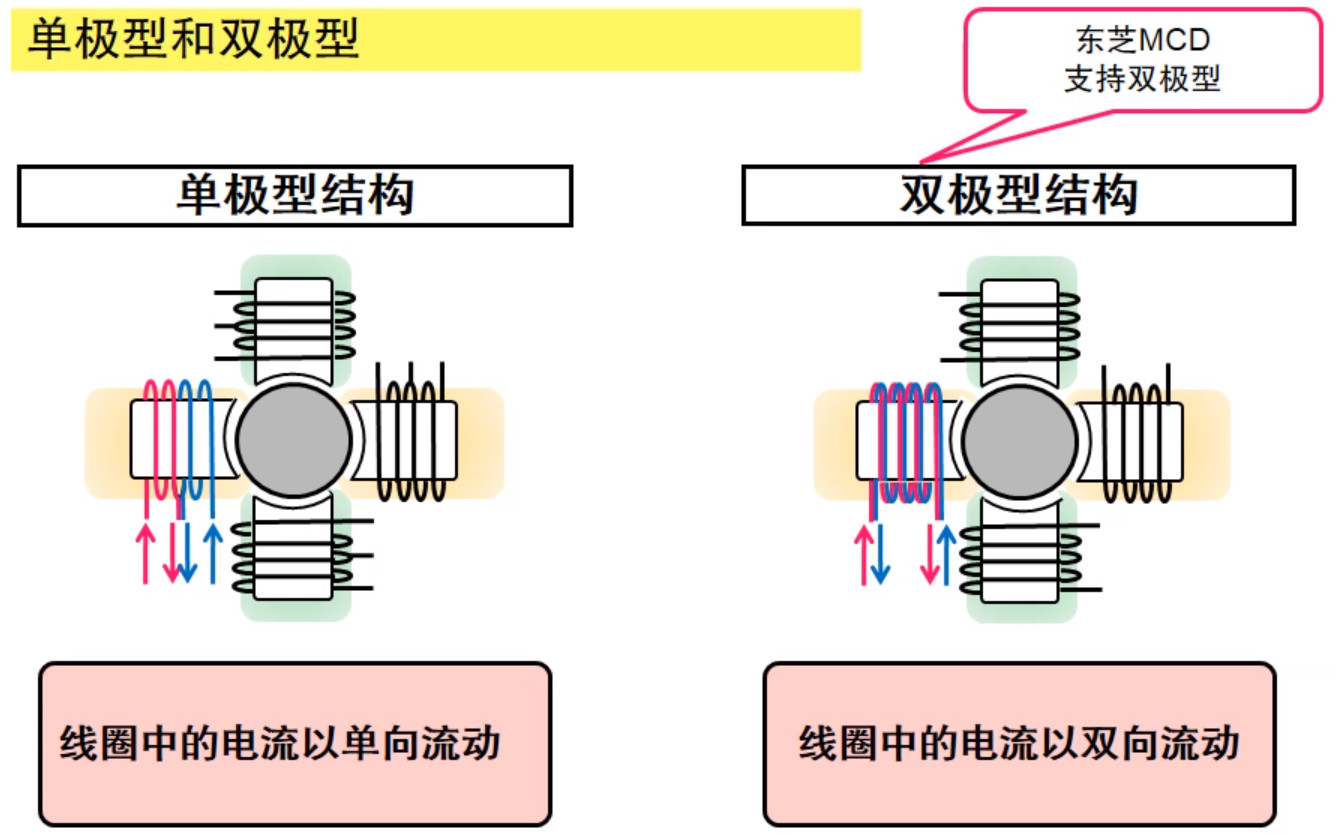
在相同电流且相同转矩输出的条件下,单极型步进电机比双极型步进电机多一倍的线圈,成本更高,控制电路的结构也不一样,目前市场上流行的大多是双极型步进电机。
步进电机在构造上通常主要按照转子特点和定子绕组进行分类,下面将详细介绍这两种类型的分类。
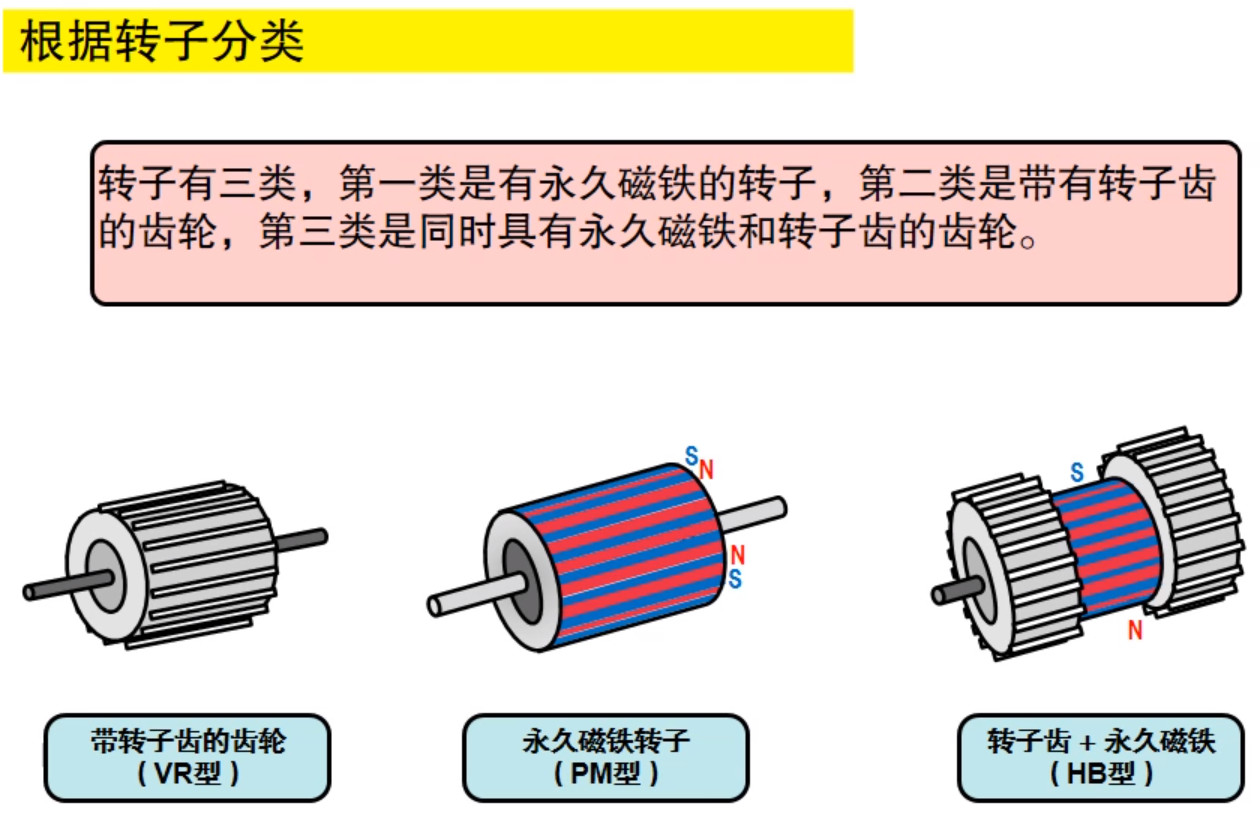
按照转子分类,有三种主要类型:反应式(VR型)、永磁式(PM型)、混合式(HB型)。
反应式
定子上有绕组,绕组由软磁材料组成。其结构简单、成本低、步距角小,可达1.2度,但动态性能差,效率低、发热大,可靠性难以保证。
永磁式
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机度差,步距角大(一般为7.5度或15度)。
混合式
混合式步进电机综合了反应式和永磁式的优点,其定子上有很多相绕组,转子上采用永磁材料,转子和定子均有多个小齿以提高步距精度。其特点是输出力矩大、动态性能好、步距角小,但结构复杂、成本相对较高。
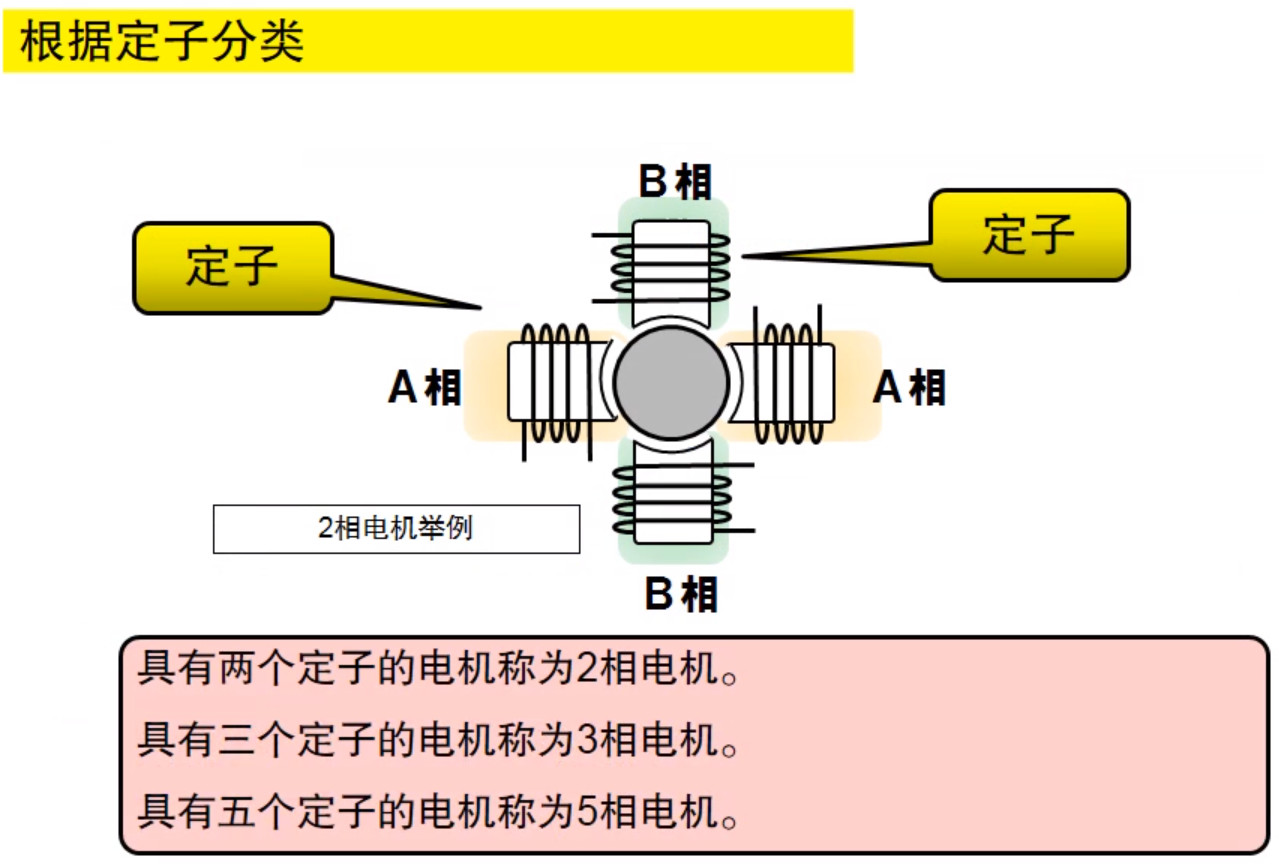
步进电机按照定子上绕组来分类,共有二相、三相和五相等系列。目前最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8度/步,配上半步驱动器后,步距角减少为0.9度,配上细分驱动器后。其步距角可细分达256倍(0.007度/微步)。由于摩檫力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度的效果。
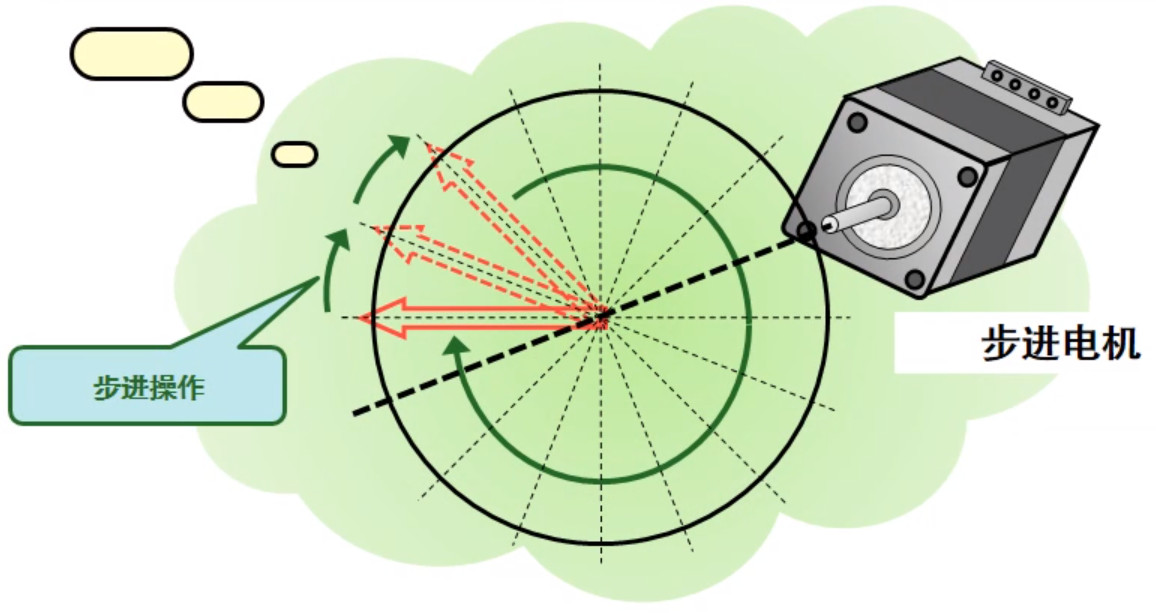
04、步进电机的工作原理:
步进电机是通过脉冲信号来进行控制,每输入一个脉冲信号,步进电机前进一步。步进电机旋转的步距角,是在电机结构的基础上等比例控制产生的,如果控制电路的细分控制不变,那么步进旋转的步距角在理论上是一个固定的角度。在实际工作中,电机旋转的步距角会有微小的差别,主要是由于电机结构上的固定有误差产生的,而且这种误差不会积累。
步进电机的总极数越大,加工精度的要求就会越高。通常工业用混合型步进电机的步距角是1.8度,就是200极。
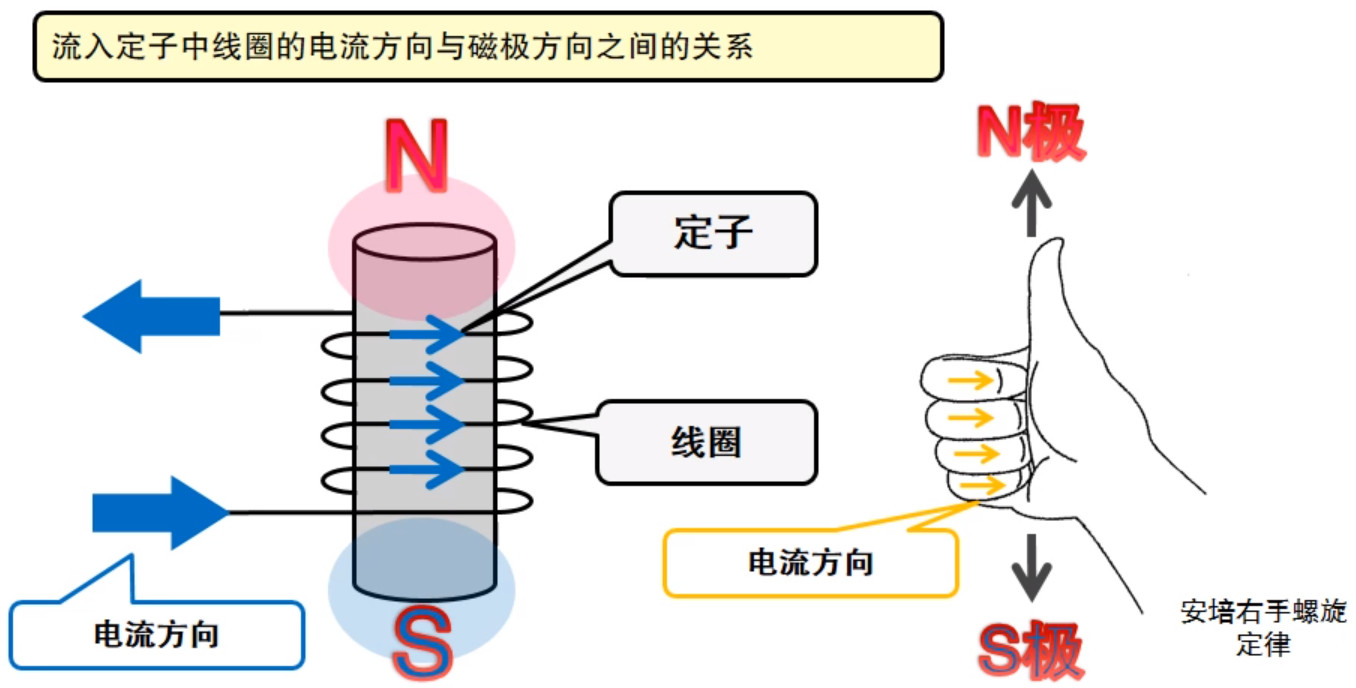
步进电机的相电流及磁场,遵循安培右手螺旋定律,由电能产生磁场能量,控制电机相电流,就能使电机定子的磁极方向发生反转,二相磁场的变化相配合,进而产生电机的旋转。
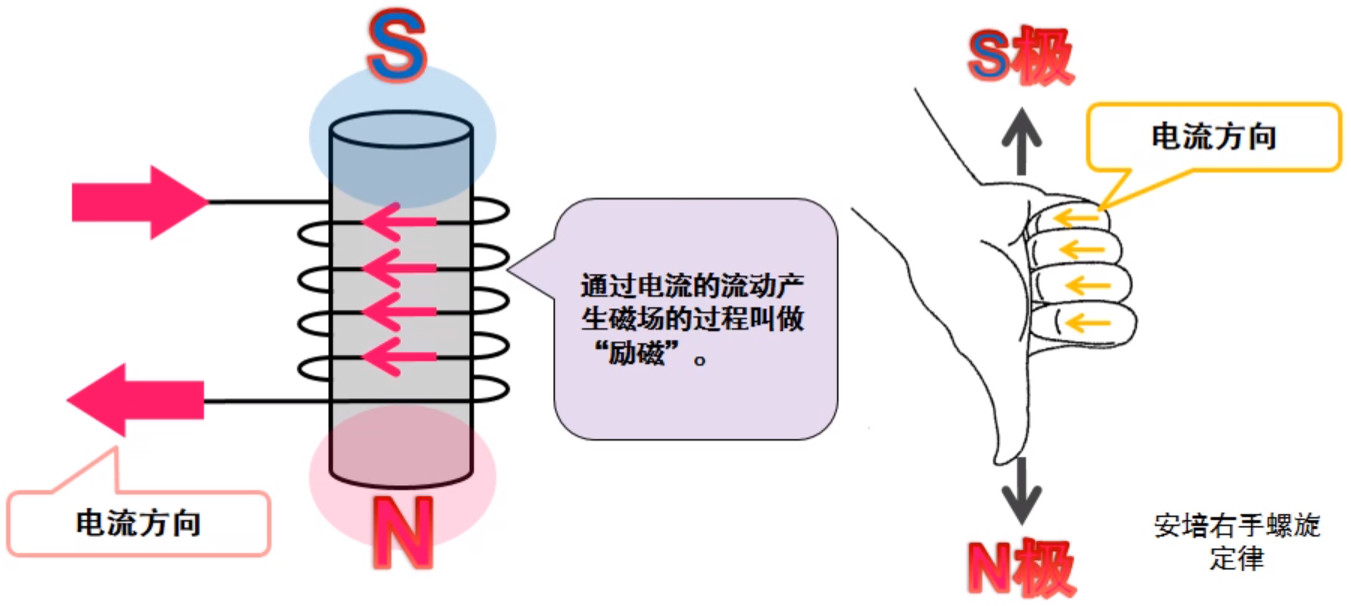
如果电流方向发生变化,磁极的方向也会发生变化,步进电机的电流流过定子产生磁场的过程叫做励磁。
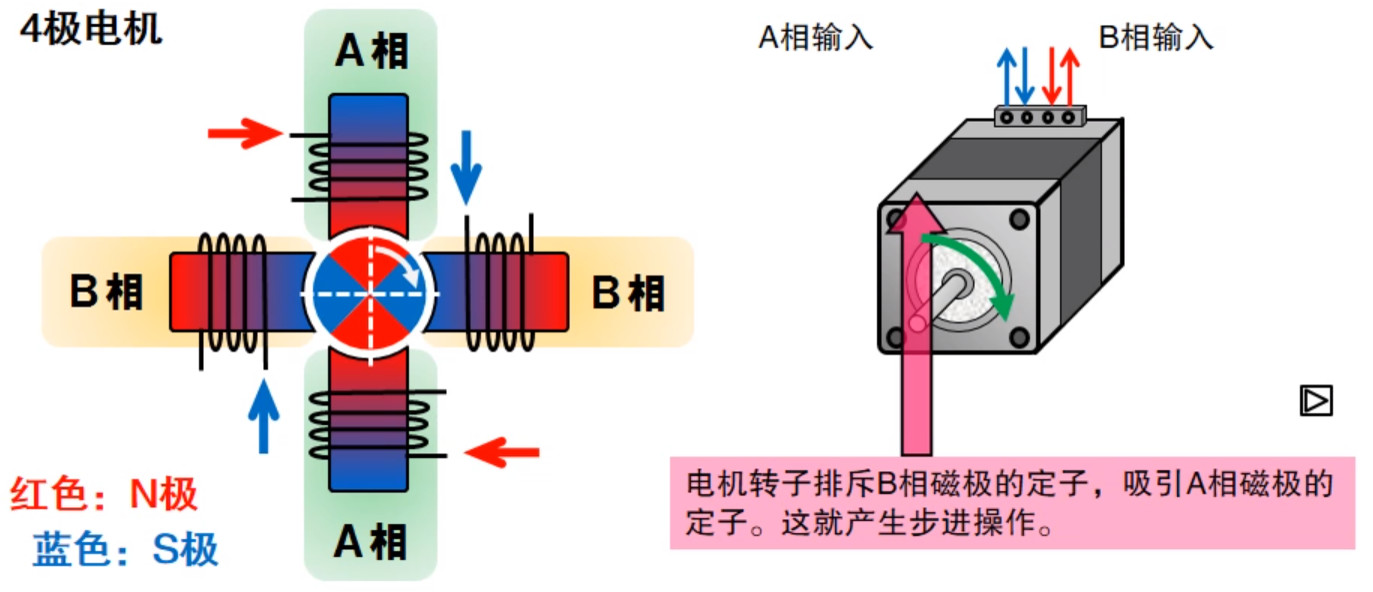
通常所说的二相步进电机,电机转子的旋转,包含不同磁极的磁场相斥和相吸实现的。如上图所示,A相产生N极磁场吸引转子的S极,B相产生S极磁场吸引转子的N极,使定子产生旋转的动力。如果改变A、B相定子线圈的电流方向,电机会产生另一步的旋转。连续改变A、B相定子线圈的电流方向,电机会产生连续的旋转。
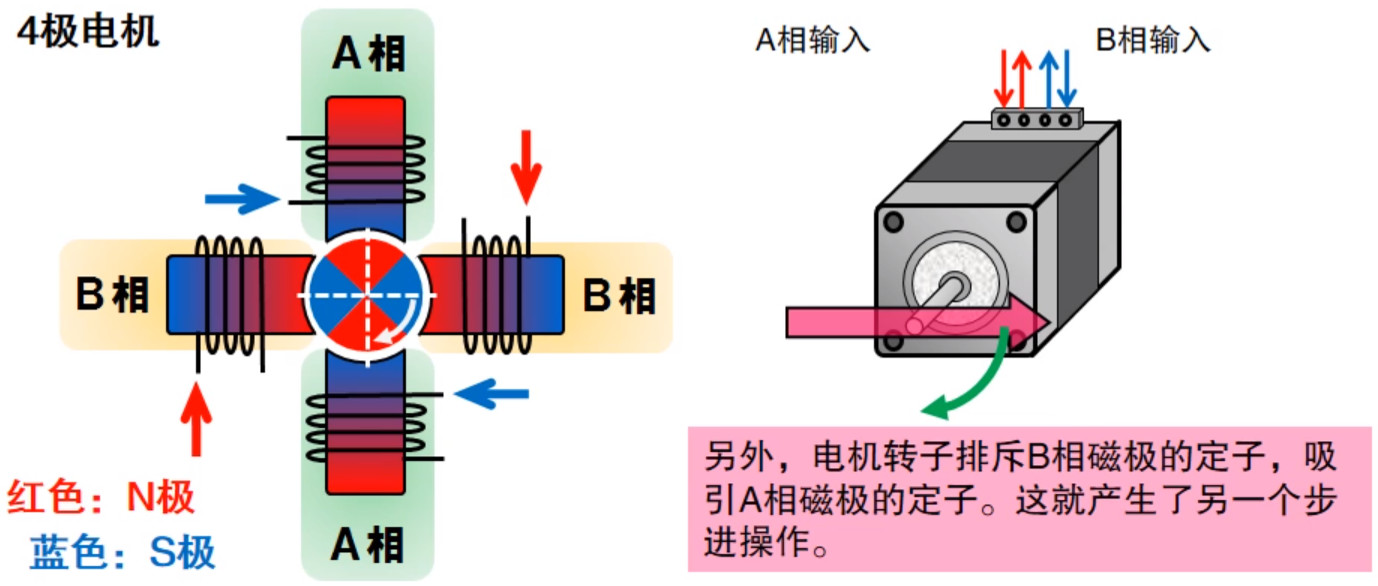
如上图所示,电机的运动是通过改变电流在电机中的流动来实现的,电子转子排斥B相磁极的定子,吸引A相磁极的定子,这就产生了另一个步进操作。
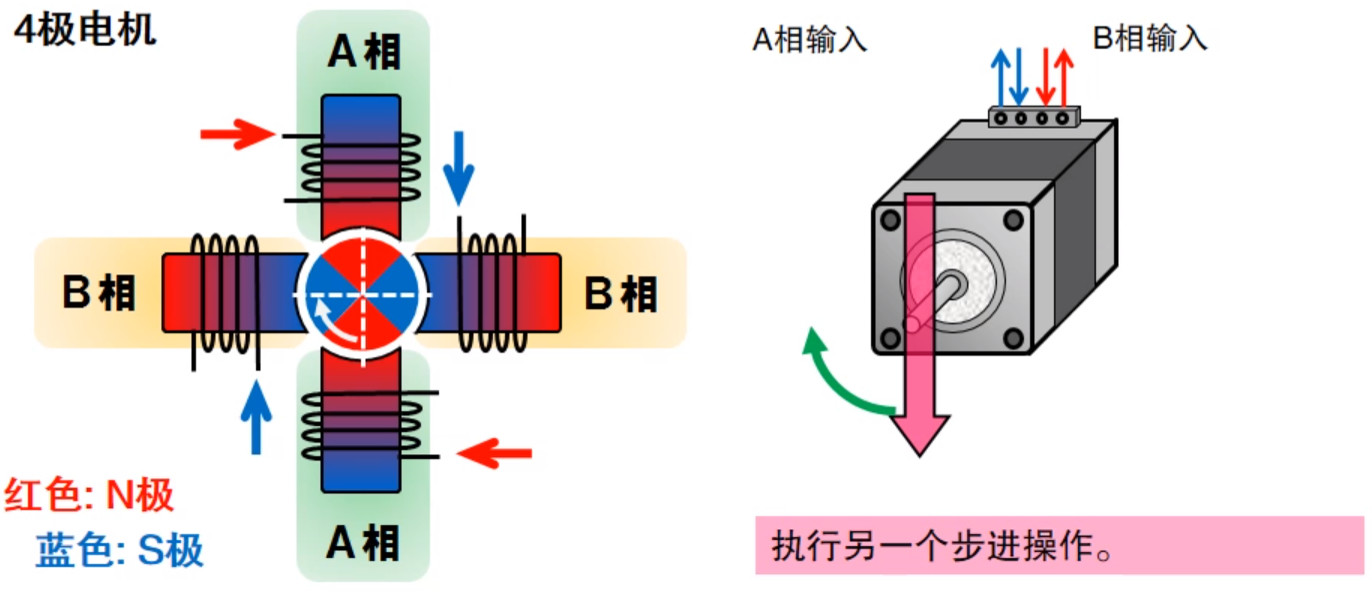
执行另一个步进操作,电机定子磁极反转,转子排斥B相磁极的定子,吸引A相磁极的定子,如上图所示。
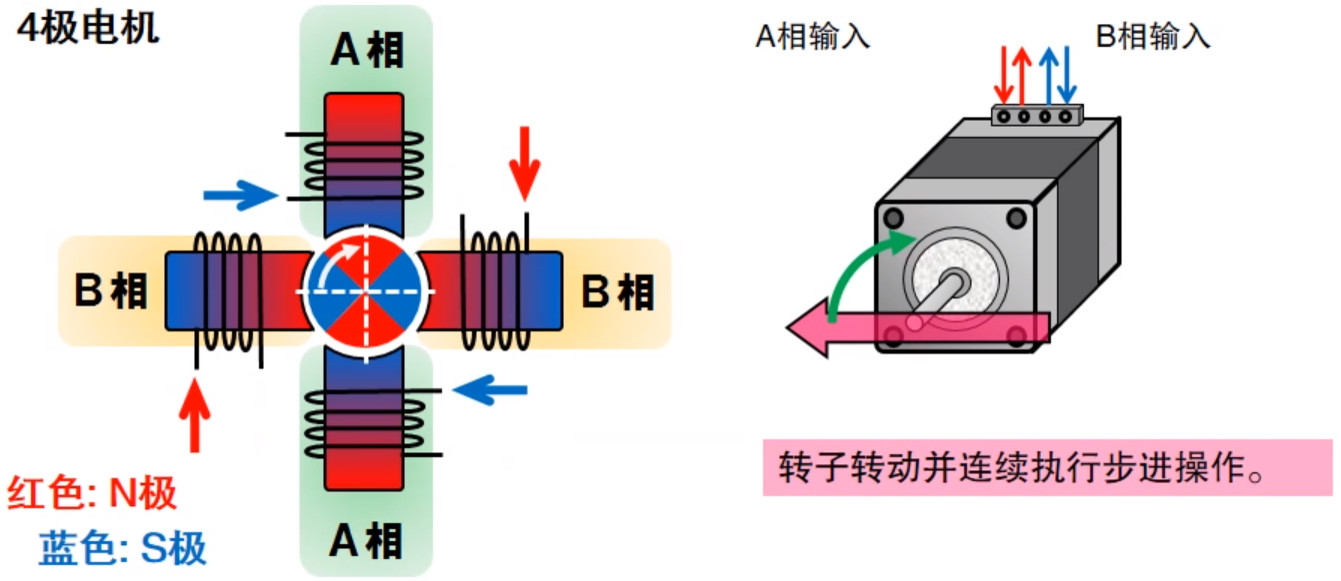
如上图所示,定子线圈中的电流方向无论何时发生变化,磁极将会反转,转子重复步进操作。东芝步进电机驱动控制电路对电机的磁场励磁的控制,是通过脉宽调制方式实现的,能够实现电机高效、稳定的运行。
本文转载自:东芝半导体与存储产品
声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有,如涉及侵权,请联系小编邮箱:cathy@eetrend.com 进行处理。