来源:EET
空间矢量调制已经成为用于基于场定向控制(FOC)的电机系统的最流行的电压调制技术。目前最常使用的SVM技术涉及直接操控电压状态以便产生所需的电压矢量,而不需要查找表或三角计算。除带来上述好处外,尚有一种不太为人所知的技术给予开发者无缝地过渡到过调制工作模式的能力。本文中,将从图形视角与支持方程角度来表述SVM的基础。
SVM三角学
大多数三相电动机不允许接入它们的中性连接。SVM利用电机内部的浮动中性点,并使用完全DC母线(buss)电压。在图1中,示出了三个电压矢量:Va在X轴上、Vb移动120度、Vc移动240度。
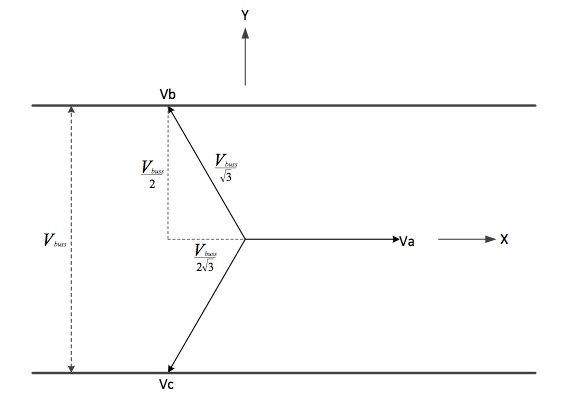
DC母线电压(Vbuss)跨越与Vb和Vc相交的两条水平线。在这种情况下,三相线-线电压Vbc充分利用了Vbuss。
图2示出了当电压矢量从X轴旋转90度且同时在Vbuss的中心保持中性时发生的情况。 目前,母线电压不够大、不足以产生电压矢量Va。这是当纯三相正弦曲线在载波上调制以产生三相PWM时的情况。 为了创建三个对称正弦曲线,必须减小所有电压矢量的幅度。每个电压矢量必须减小的量如下式所述:
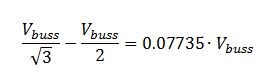
这将峰-峰值电压降低了15.5%。
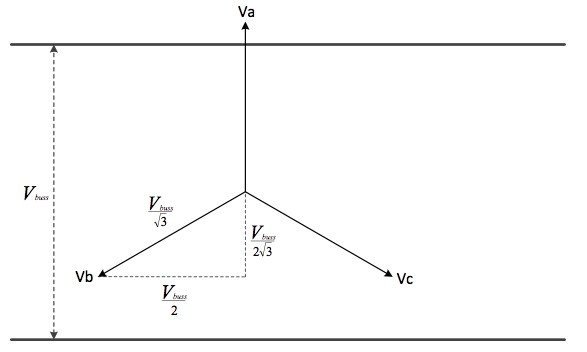
SVM技术采用图2中的三相矢量,并将它们全部向下移动,使得相电压的大小不必减小。 采用图2并将其中性向下移动、如图3所示,允许电压矢量Va具有相同幅度。在图3的情况下,中性点从Vbuss /2向下偏移,偏移量如下:
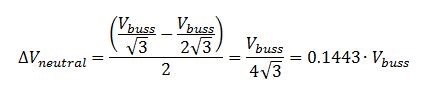
对图3来说,向下移动没问题,但当Va直接指向下方而非上方时,情况会怎样?在这种情况下,我们需要将所有电压矢量向上移动等于0.1443×Vbuss的量。 换句话说,需要被添加到所有电压矢量的共模偏差的量是动态的,并且是空间矢量旋转角度的函数。
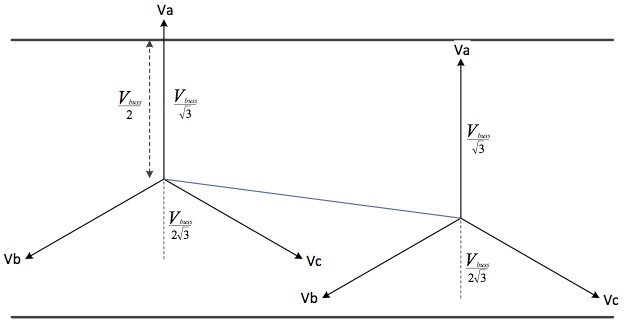
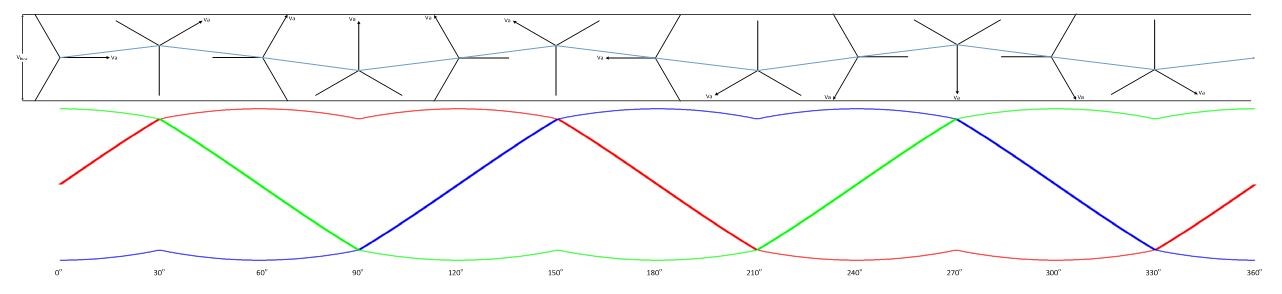
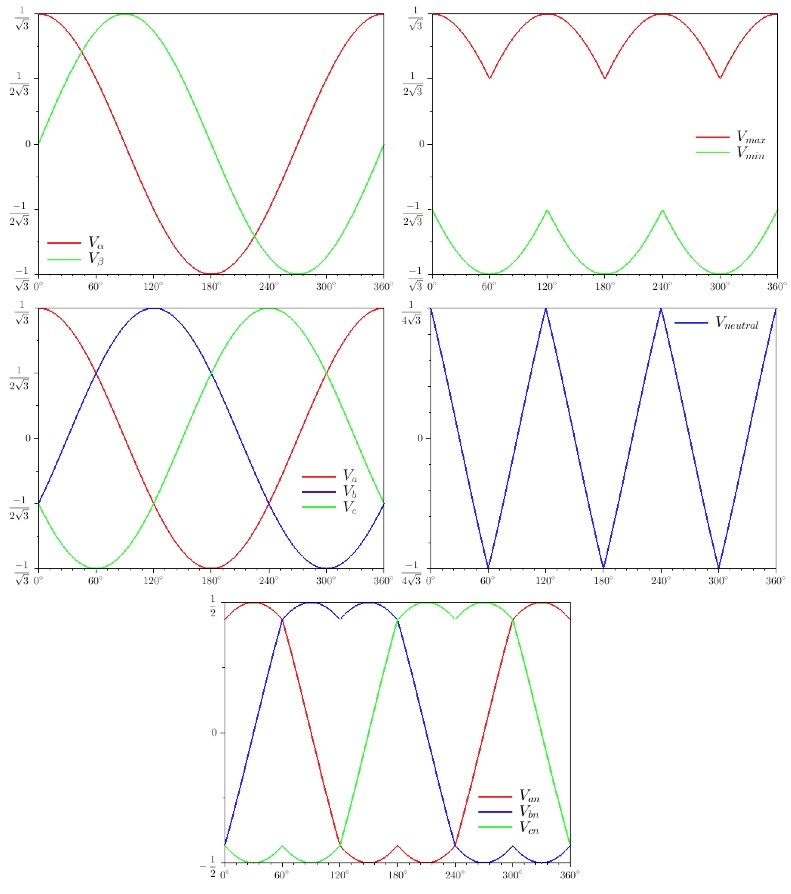
图4示出了SVM波形的360度旋转。你还可以看到电压矢量的方向和中性点经历的路径。
创建SVM
SVM用在微控制器(MCU)中时,计算量必须保持最小。当初次研究SVM时,得出的印象是:必须创建三个正弦曲线和一个三角波形。如果是这种情况,那么SVM将对处理器和内存有高要求。因为不需要正弦计算或查找表,所以比预期简单得多。让我们首先了解如何创建三相波形。 在FOC系统中,控制在同步参考系中完成,其中大多数信号看起来像DC波形。然后,通过逆Park变换将同步信号变换成静止参考系。在静止参考系中只出现两个随时间变化的信号。当处于稳定状态时,信号采取正弦和余弦形式。 SVM必须将Vα和Vβ这两个信号从静止参考系取出,并将它们转换成三相(Va,Vb和Vc)输出。在嵌入式处理器中,SVM算法的输出必须是可以使用MCU的PWM外设轻松创建的PWM波形。
创建SVM的三个过程如下:
1.执行逆克拉克(Clarke)变换以将Vα和Vβ转换为Va、Vb和Vc。逆克拉克算法如下:
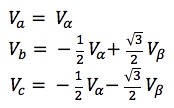
2.使用以下公式创建三角形中性点:

3.从Va、Vb和Vc中减去Vneutral。
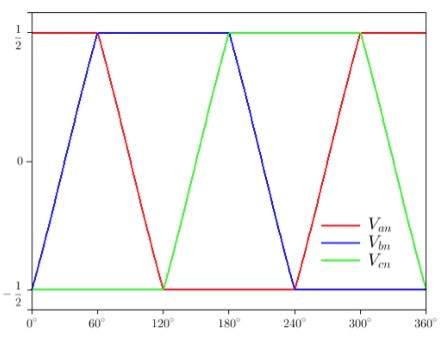
在步骤3之后,SVM信号被加载到PWM外设比较寄存器中。图5中的五条曲线显示了每个信号的不同幅度,它们产生了在其峰值处具有100%占空比的SVM波形。
SVM过调制
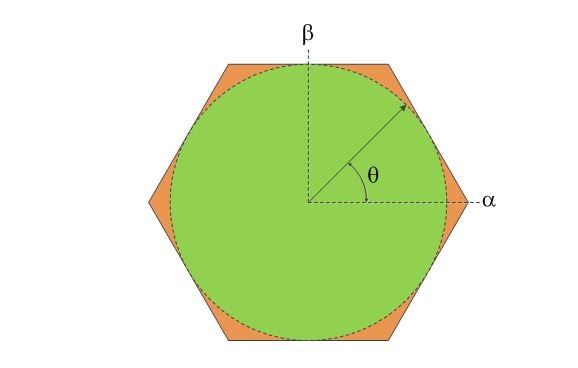
在上一节中,我们创建了一个SVM波形,其峰值可以达到Vbuss的100%占空比。这产生纯线到线的电压正弦波。仍然存在生成更多电压的可能性,但不是以纯正弦波形式。 参见图6,目前已经描述的SVM波形可以覆盖绿色圆圈内的任何地方。可以通过过调制使用橙色阴影的未使用区域。当处于完全过调制时,电压矢量Vs将覆盖整个六边形。过调制将产生梯形输出波形,其中优点是有更高的基波正弦波幅度(带一些谐波)和更低的开关损耗。
从图5中,Vα和Vβ的最大和最小峰值是±1/√3,这对应于图6的绿色圆圈的周边轨迹。随着克拉克变换的输入变得大于1/√3 ,SVM波形将增长到超过±½,而这是不可能的。
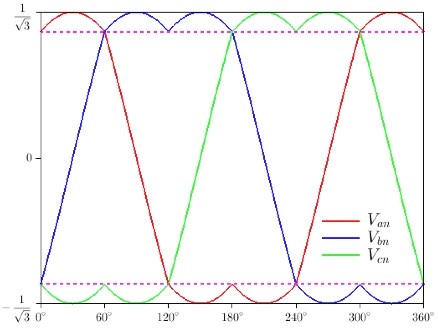
图7示出了当克拉克变换的输入幅度变得大于1/√3、等于2/3时发生的情况。如品红虚线所示,SVM的旧幅度在±1/2;现在峰值幅度在1/√3。 这个SVM技术的好处是:过渡到过调制很容易。限制波形输出所需要的是限制SVM输出的Va、Vb和Vc的最大值和最小值。 具有过调制的总SVM系统的框图如图8所示。
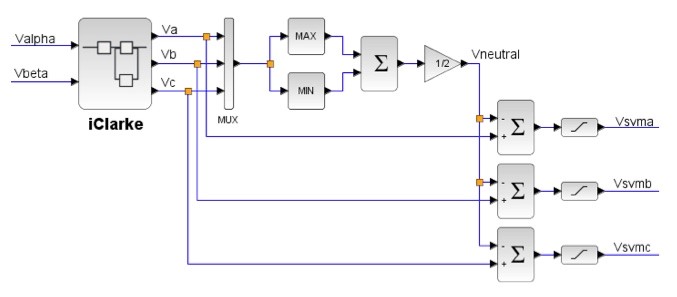
SVM电压输出受三个饱和元素的限制,这三个饱和元素设置为100%和0%占空比,即±1/2。 完全过调制的结果波形如图9所示。
当将电压信号从两相α-β转换为三相A、B、C时,空间矢量调制是用于场定向控制的有效技术。SVM利用移位三相中性值以允许直流母线的完全线-线利用。已经给出了用于创建SVM的一种技术。这种技术的优点是易于用MCU实现,因为它不需要任何正弦计算或查找表。此外,它可以非常平稳地转换到过调制。
*参考书目
Mohan,Ned,《高级电力驱动:使用Simulink进行分析、控制和建模》,明尼苏达电力电子研究与教育,2001年。*