资料下载:使用ATmega328PB时钟故障检测
cathy -- 周一, 01/18/2021 - 15:20
如果使能熔丝寄存器的 CFD 位,ATmega328PB megaAVR® 8 位单片机将支持时钟故障检测(CFD)和自动切换内部阻容(RC)振荡器,用于时钟冗余应用。一旦使能 CFD熔丝,将使能 128 kHz 振荡器,CFD 电路将以该时钟工作。
如果使能熔丝寄存器的 CFD 位,ATmega328PB megaAVR® 8 位单片机将支持时钟故障检测(CFD)和自动切换内部阻容(RC)振荡器,用于时钟冗余应用。一旦使能 CFD熔丝,将使能 128 kHz 振荡器,CFD 电路将以该时钟工作。

时钟元件
时钟元件是利用压电效应产生时钟信号的被动元件。村田时钟元件系列产品分为:MEMS谐振器、晶体谐振、陶瓷谐振器、振荡器。以下是24种应用场景,根据不同的功能需求,村田为您推荐合适的产品。

本文主要介绍晶体的负载电容及计算方法,及其硬件设计。
1、负载电容
晶体元件的负载电容是指在电路中跨接晶体两端的总的外界有效电容。是指晶振要正常振荡所需要的电容。一般外接电容,是为了使晶振两端的等效电容等于或接近负载电容。要求高的场合还要考虑IC输入端的对地电容。应用时一般在给出负载电容值附近调整可以得到精确频率。负载电容的大小主要影响负载谐振频率和等效负载谐振电阻。
2、计算方法
两个电容Cg、Cd(此电容称为Trim电容(Trimmer Capacitor微调电容))通过地串联又与晶振并联,并与其他杂散电容并联。负载频率不同决定振荡器的振荡频率不同。标称频率相同的晶体,负载电容不一定相同。因为石英晶体振荡器有两个谐振频率,一个是串联谐振频率(低负载电容的晶振);另一个为并联谐振频率(高负载电容的晶振)。所以,标称频率相同的晶振互换时还必须要求负载电容一致,否则会造成电器工作不正常。
一般选择Cg、Cd值要比其他杂散电容高8~10倍,来减少杂散电容影响。一般IC引脚杂散电容约为2~3pF。

在通信或者工业应用中,同步时钟非常重要,它确保了信号的完整性和一致性。可以说,时钟同步技术是现代通信中不可缺少的一个重要环节,选择好的同步时钟至关重要。
在本篇文章——噪声源时钟树第2部分案例中,我们将更详细地讨论如何计算包含抖动衰减器的噪声源时钟树的总抖动。同时还将提供测量和相关数据表示例。
概述
在第1部分中,我们首先讨论了低抖动源规范时钟树和如何通过RSS计算总抖动,并回顾了抖动传递,抖动生成和加性抖动等术语。 接着我介绍噪声源时钟树,添加抖动衰减的动机,以及如何计算其总抖动。
正如上一单元所提及,跟随时钟信号从时钟树组件到接收器或目的地,将被视为处理相位噪声最好的系统。 也就是说,如果我们知道每个时钟树组件的相位噪声特性,我们就应该能够在特定的抖动带宽上估计结束时钟相位噪声及其相位抖动。
我认为这种方法更普遍性和准确性——它可应用于所有类型的时钟树,有噪声源和抖动衰减器或没有噪声源和抖动衰减器。
基本理念
一般方法如下所示。每个时钟树可看作级联相位噪声处理元件,并可从常规意义上建模为抖动生成(JGEN)相位噪声的RSS与抖动传递函数(JTF),一并应用于缩放输入时钟相位噪声。
这是因为缩放使得对RSS有贡献的组件都处于相同的载波频率。 在以下的例子中,将会呈现更加清晰得细节。

作者: Silicon Labs
在本单元秒懂时钟系列——噪声源时钟树第1部分案例,我们将超越原型或“标准”时钟树。我将对添加抖动衰减器的动机及其对时钟树抖动估计的影响进行讨论,所以让我们开始吧。
准时钟树
板级时钟树或时钟分配网络,例如数据中心应用,通常用晶体或低抖动XO(晶体振荡器)来描述,其连接到时钟发生器,后跟一个或多个缓冲器,如下所示。这就是我所说的标准时钟树:
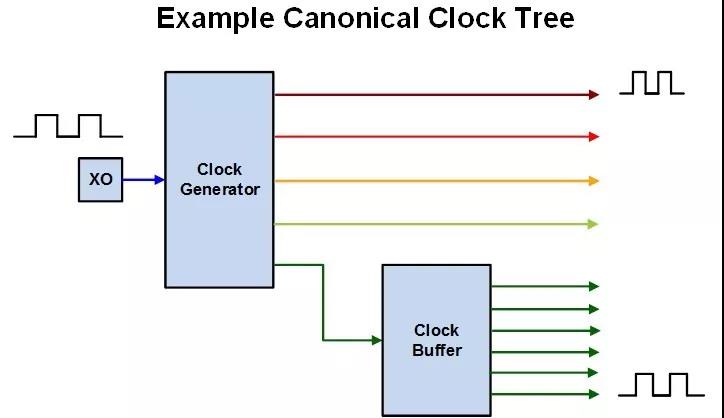
在该示例中,时钟树的根或源是低抖动XO,其总体上确定时钟树的频率稳定性。紧接着,时钟发生器将输入频率从XO缩放到几个不同(通常更高)的输出频率。最后,时钟缓冲器采用这些输出频率之一并产生具有相同频率的多个输出时钟。图中的彩色箭头表示不同的时钟频率。
差分信号
差分传输是一种信号传输的技术,区别于传统的一根信号线一根地线的做法,差分传输在这两根线上都传输信号,这两个信号的振幅相等,相位相反。在这两根线上传输的信号就是差分信号。差分信号又称差模信号,是相对共模信号而言的。

单板上时钟的注意事项,主要有以下几个方面可以考虑:
1、布局
a、时钟晶体和相关电路应布置在PCB的中央位置并且要有良好的地层,而不是靠近I/O接口处。不可将时钟产生电路做成子卡或者子板的形式,必须做在单独的时钟板上或者承载板上。
如下图所示,绿色框中部分下一层最好不要走线
作者:Graham Mostyn
几乎每个电子器件都需要一个时钟源。例如,单片机(MCU)使用振荡器来前进到下一条指令,无线电需要通过精确的振荡器来将射频信号混合到基带中加以处理。

概述
数十年来,振荡器和时钟始终依靠石英晶体来构建稳定的参考频率。晶体在许多应用中表现出十分优异的性能。但十年前,用MEMS谐振器代替石英晶体的微机电系统(Microelectromechanical System,MEMS)技术进入了市场,并且正在迅速走向成熟。